 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeFormal Verification of Robustness and Resilience of Learning-Enabled State Estimation Systems for Robotics
Paper and Code
Oct 16, 2020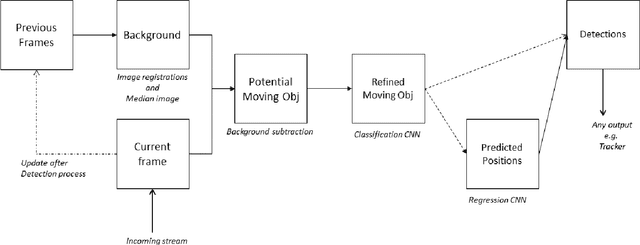
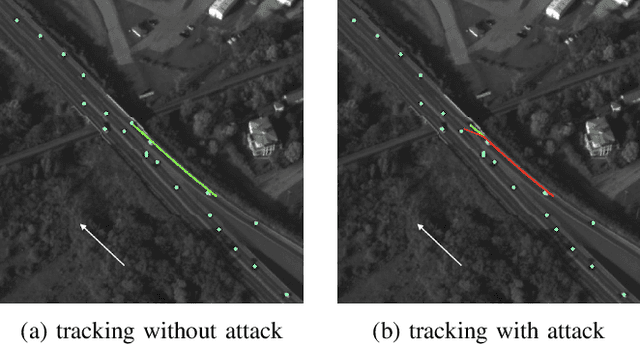

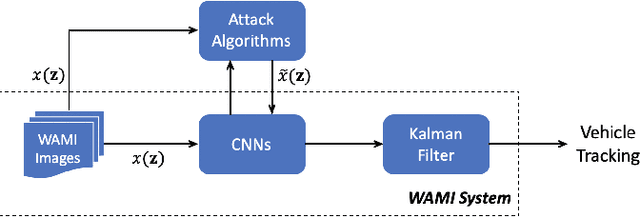
This paper presents a formal verification guided approach for a principled design and implementation of robust and resilient learning-enabled systems. We focus on learning-enabled state estimation systems (LE-SESs), which have been widely used in robotics applications to determine the current state (e.g., location, speed, direction, etc.) of a complex system. The LE-SESs are networked systems composed of a set of connected components including Bayes filters for localisation, and neural networks for processing sensory input. We study LE-SESs from the perspective of formal verification, which determines the satisfiability of a system model against the specified properties. Over LE-SESs, we investigate two key properties - robustness and resilience - and provide their formal definitions. To enable formal verification, we reduce the LE-SESs to a novel class of labelled transition systems, named {PO}2-LTS in the paper, and formally express the properties as constrained optimisation objectives. We prove that the robustness verification is NP-complete. Based on {PO}2-LTS and the optimisation objectives, practical verification algorithms are developed to check the satisfiability of the properties on the LE-SESs. As a major case study, we interrogate a real-world dynamic tracking system which uses a single Kalman Filter (KF) - a special case of Bayes filter - to localise and track a ground vehicle. Its perception system, based on convolutional neural networks, processes a high-resolution Wide Area Motion Imagery (WAMI) data stream. Experimental results show that our algorithms can not only verify the properties of the WAMI tracking system but also provide representative examples, the latter of which inspired us to take an enhanced LE-SESs design where runtime monitors or joint-KFs are required. Experimental results confirm the improvement of the robustness of the enhanced design.