 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeBALM: Bundle Adjustment for Lidar Mapping
Paper and Code
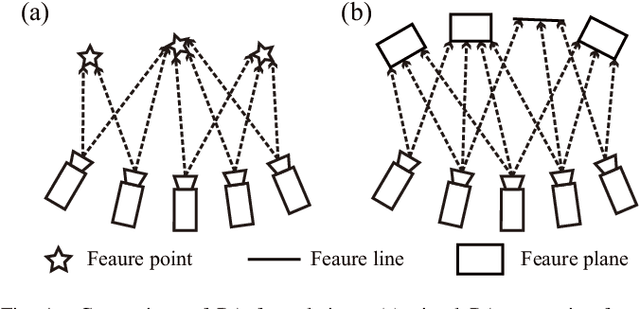
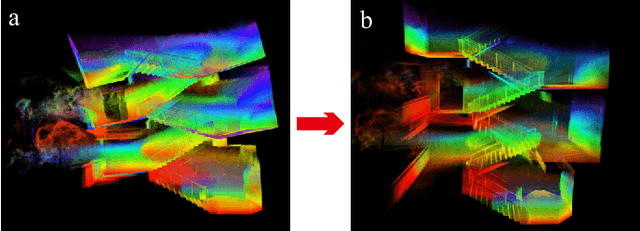
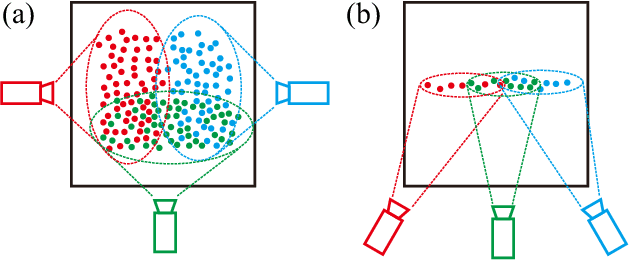
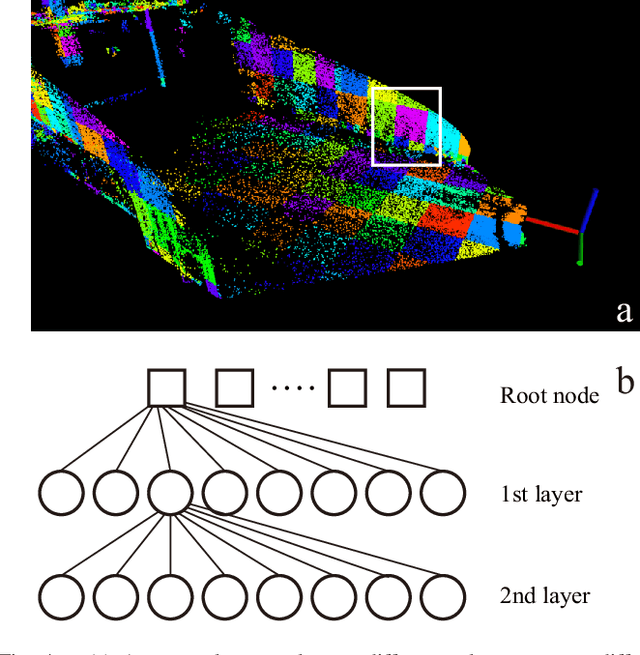
We propose a framework for bundle adjustment (BA) on sparse lidar points and incorporate it to a lidar odometry and mapping (LOAM) to lower the drift. A local BA on a sliding window of keyframes has been widely used in visual SLAM and has proved to be very effective in lowering the drift. But in lidar mapping, BA method is hardly used because the sparse feature points (e.g., edge and plane) in a lidar point-cloud make the exact feature matching impossible. Our method is to enforce feature points lie on the same edge or plane by minimizing the eigenvalue of the covariance matrix. To speedup the optimization, we derive the analytical derivatives, up to second order, in closed form. Moreoever, we propose a novel adaptive voxelization method to search feature correspondence efficiently. The proposed formulations are incorporated into a LOAM back-end for map refinement. Results show that, although as a back-end, the local BA can be solved very efficiently, even in real-time at 10Hz when optimizing 20 scans of point-cloud. The local BA also considerably lowers the LOAM drift. Our implementation of the BA optimization and LOAM are open-sourced to benefit the community.