 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeFAST-LIO: A Fast, Robust LiDAR-inertial Odometry Package by Tightly-Coupled Iterated Kalman Filter
Paper and Code
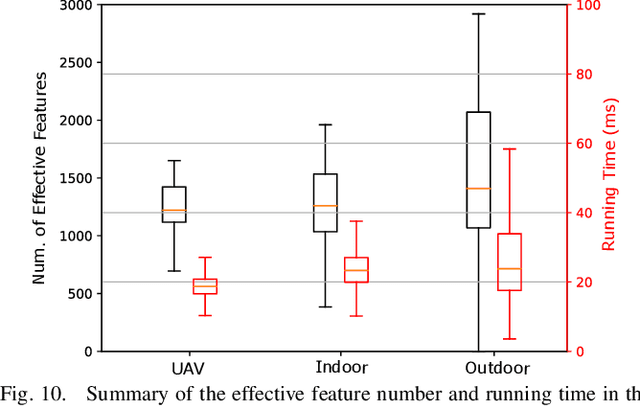
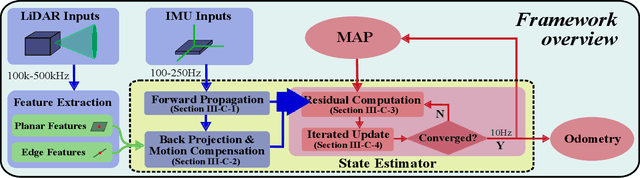
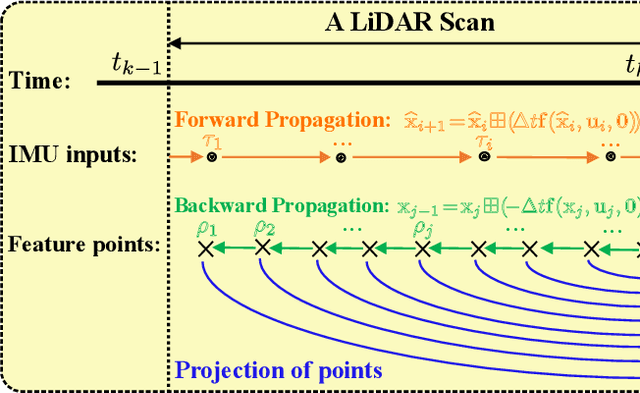
This paper presents a computationally efficient and robust LiDAR-inertial odometry framework. We fuse LiDAR feature points with IMU data using a tightly-coupled iterated extended Kalman filter to allow robust navigation in fast-motion, noisy or cluttered environments where degeneration occurs. To lower the computation load in the presence of large number of measurements, we present a new formula to compute the Kalman gain. The new formula has computation load depending on the state dimension instead of the measurement dimension. The proposed method and its implementation are tested in various indoor and outdoor environments. In all tests, our method produces reliable navigation results in real-time: running on a quadrotor onboard computer, it fuses more than 1,200 effective feature points in a scan and completes all iterations of an iEKF step within 25 ms. Our codes are open-sourced online.