 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRobust Keypoint Detection and Pose Estimation of Robot Manipulators with Self-Occlusions via Sim-to-Real Transfer
Paper and Code
Oct 15, 2020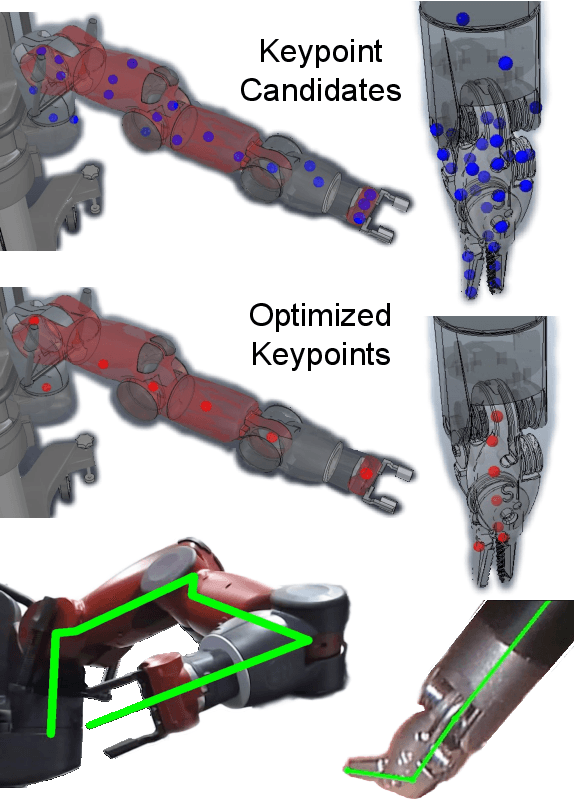
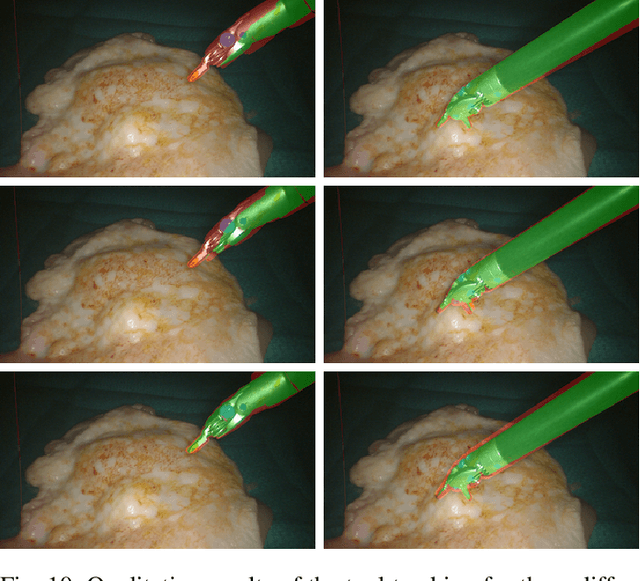
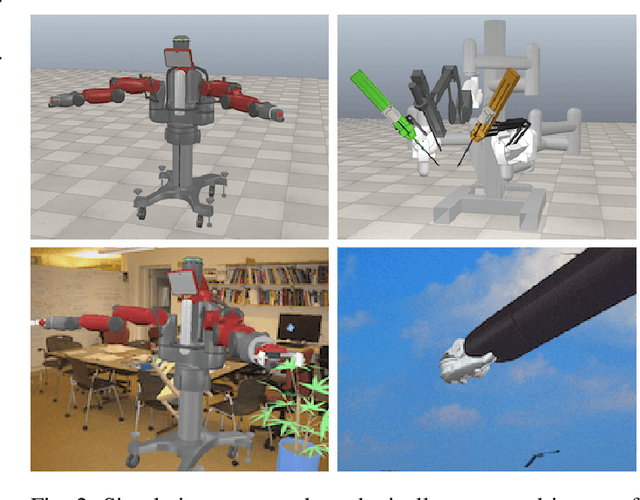
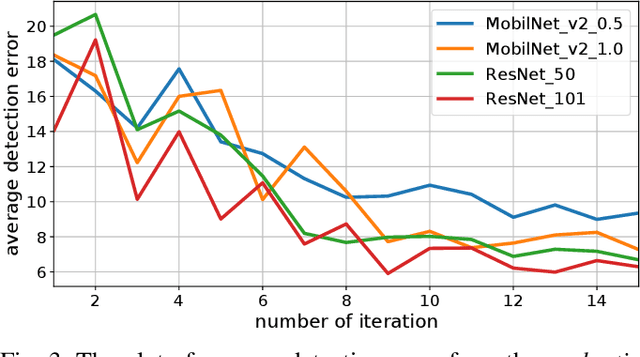
Keypoint detection is an essential building block for many robotic applications like motion capture and pose estimation. Historically, keypoints are detected using uniquely engineered markers such as checkerboards, fiducials, or markers. More recently, deep learning methods have been explored as they have the ability to detect user-defined keypoints in a marker-less manner. However, deep neural network (DNN) detectors can have an uneven performance for different manually selected keypoints along the kinematic chain. An example of this can be found on symmetric robotic tools where DNN detectors cannot solve the correspondence problem correctly. In this work, we propose a new and autonomous way to define the keypoint locations that overcomes these challenges. The approach involves finding the optimal set of keypoints on robotic manipulators for robust visual detection. Using a robotic simulator as a medium, our algorithm utilizes synthetic data for DNN training, and the proposed algorithm is used to optimize the selection of keypoints through an iterative approach. The results show that when using the optimized keypoints, the detection performance of the DNNs improved so significantly that they can even be detected in cases of self-occlusion. We further use the optimized keypoints for real robotic applications by using domain randomization to bridge the reality gap between the simulator and the physical world. The physical world experiments show how the proposed method can be applied to the wide-breadth of robotic applications that require visual feedback, such as camera-to-robot calibration, robotic tool tracking, and whole-arm pose estimation.