 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeUnderstanding Spatial Robustness of Deep Neural Networks
Paper and Code
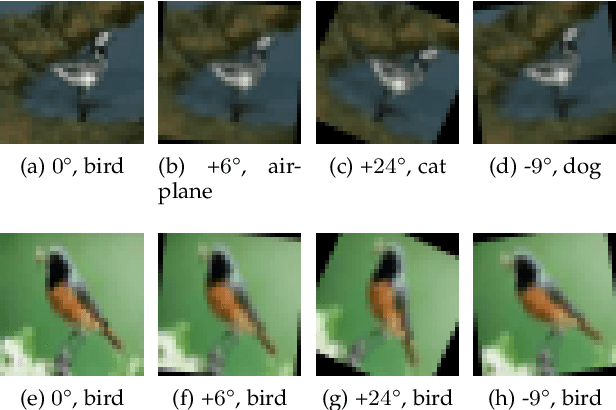
Deep Neural Networks (DNNs) are being deployed in a wide range of settings today, from safety-critical applications like autonomous driving to commercial applications involving image classifications. However, recent research has shown that DNNs can be brittle to even slight variations of the input data. Therefore, rigorous testing of DNNs has gained widespread attention. While DNN robustness under norm-bound perturbation got significant attention over the past few years, our knowledge is still limited when natural variants of the input images come. These natural variants, e.g. a rotated or a rainy version of the original input, are especially concerning as they can occur naturally in the field without any active adversary and may lead to undesirable consequences. Thus, it is important to identify the inputs whose small variations may lead to erroneous DNN behaviors. The very few studies that looked at DNN's robustness under natural variants, however, focus on estimating the overall robustness of DNNs across all the test data rather than localizing such error-producing points. This work aims to bridge this gap. To this end, we study the local per-input robustness properties of the DNNs and leverage those properties to build a white-box (DEEPROBUST-W) and a black-box (DEEPROBUST-B) tool to automatically identify the non-robust points. Our evaluation of these methods on nine DNN models spanning three widely used image classification datasets shows that they are effective in flagging points of poor robustness. In particular, DEEPROBUST-W and DEEPROBUST-B are able to achieve an F1 score of up to 91.4% and 99.1%, respectively. We further show that DEEPROBUST-W can be applied to a regression problem for a self-driving car application.