 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAnalysis of Theoretical and Numerical Properties of Sequential Convex Programming for Continuous-Time Optimal Control
Paper and Code
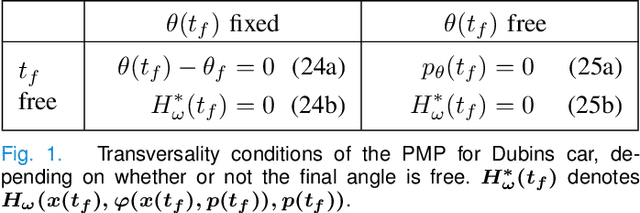
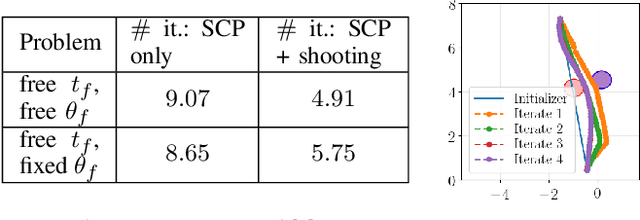
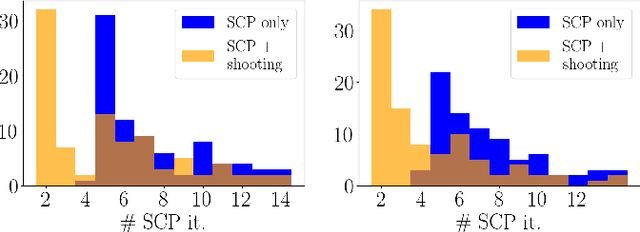
Through the years, Sequential Convex Programming (SCP) has gained great interest as an efficient tool for non-convex optimal control. Despite the large number of existing algorithmic frameworks, only a few are accompanied by rigorous convergence analysis, which are often only tailored to discrete-time problem formulations. In this paper, we present a unifying theoretical analysis of a fairly general class of SCP procedures which is applied to the original continuous-time formulation. Besides the extension of classical convergence guarantees to continuous-time settings, our analysis reveals two new features inherited by SCP-type methods. First, we show how one can more easily account for manifold-type constraints, which play a key role in the optimal control of mechanical systems. Second, we demonstrate how the theoretical analysis may be leveraged to devise an accelerated implementation of SCP based on indirect methods. Detailed numerical experiments are provided to show the key benefits of a continuous-time analysis to improve performance.