 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLabels Are Not Perfect: Improving Probabilistic Object Detection via Label Uncertainty
Paper and Code
Aug 10, 2020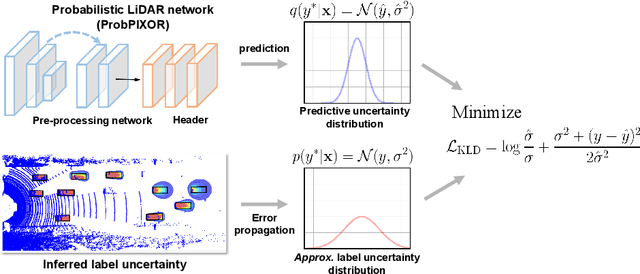
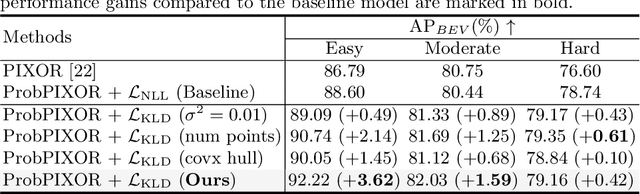

Reliable uncertainty estimation is crucial for robust object detection in autonomous driving. However, previous works on probabilistic object detection either learn predictive probability for bounding box regression in an un-supervised manner, or use simple heuristics to do uncertainty regularization. This leads to unstable training or suboptimal detection performance. In this work, we leverage our previously proposed method for estimating uncertainty inherent in ground truth bounding box parameters (which we call label uncertainty) to improve the detection accuracy of a probabilistic LiDAR-based object detector. Experimental results on the KITTI dataset show that our method surpasses both the baseline model and the models based on simple heuristics by up to 3.6% in terms of Average Precision.