 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeFast Lane-Level Intersection Estimation using Markov Chain Monte Carlo Sampling and B-Spline Refinement
Paper and Code
Jul 14, 2020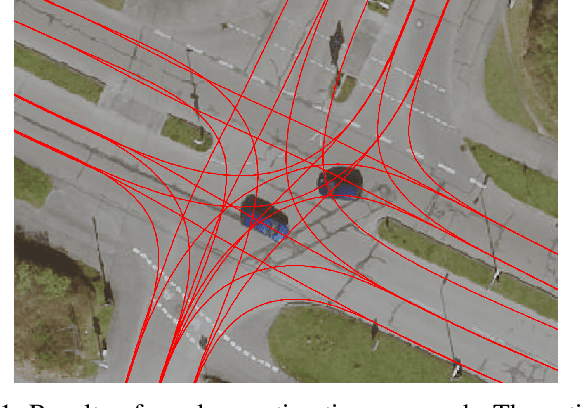
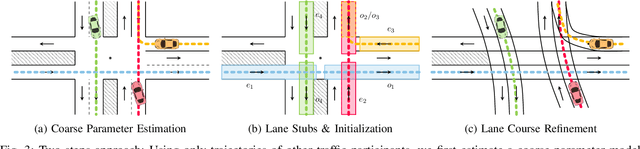
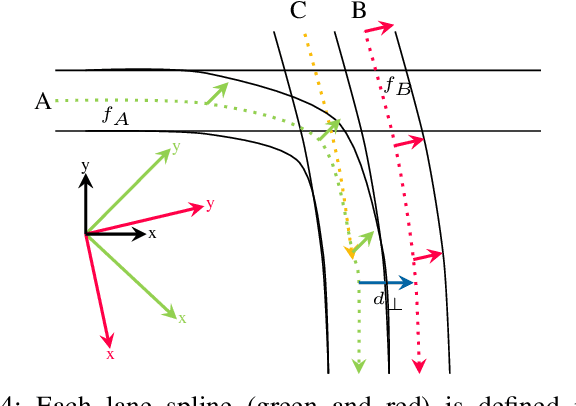
Estimating the current scene and understanding the potential maneuvers are essential capabilities of automated vehicles. Most approaches rely heavily on the correctness of maps, but neglect the possibility of outdated information. We present an approach that is able to estimate lanes without relying on any map prior. The estimation is based solely on the trajectories of other traffic participants and is thereby able to incorporate complex environments. In particular, we are able to estimate the scene in the presence of heavy traffic and occlusions. The algorithm first estimates a coarse lane-level intersection model by Markov chain Monte Carlo sampling and refines it later by aligning the lane course with the measurements using a non-linear least squares formulation. We model the lanes as 1D cubic B-splines and can achieve error rates of less than 10cm within real-time.