 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLearning to Detect 3D Reflection Symmetry for Single-View Reconstruction
Paper and Code
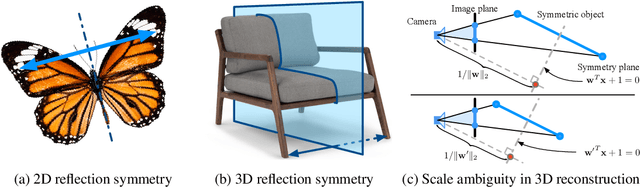
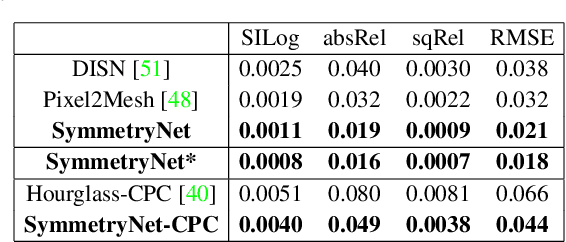
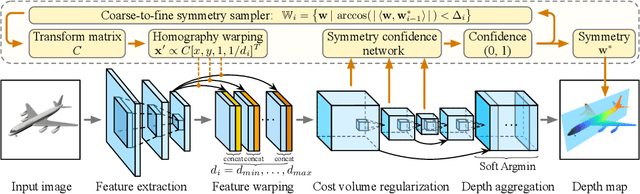
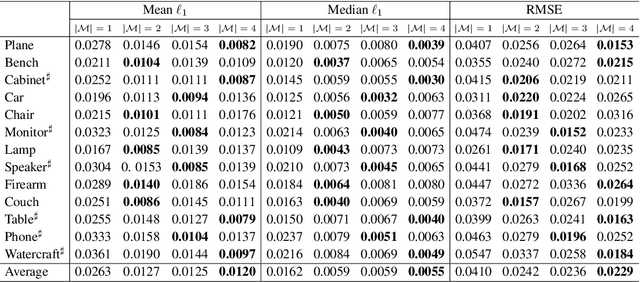
3D reconstruction from a single RGB image is a challenging problem in computer vision. Previous methods are usually solely data-driven, which lead to inaccurate 3D shape recovery and limited generalization capability. In this work, we focus on object-level 3D reconstruction and present a geometry-based end-to-end deep learning framework that first detects the mirror plane of reflection symmetry that commonly exists in man-made objects and then predicts depth maps by finding the intra-image pixel-wise correspondence of the symmetry. Our method fully utilizes the geometric cues from symmetry during the test time by building plane-sweep cost volumes, a powerful tool that has been used in multi-view stereopsis. To our knowledge, this is the first work that uses the concept of cost volumes in the setting of single-image 3D reconstruction. We conduct extensive experiments on the ShapeNet dataset and find that our reconstruction method significantly outperforms the previous state-of-the-art single-view 3D reconstruction networks in term of the accuracy of camera poses and depth maps, without requiring objects being completely symmetric. Code is available at https://github.com/zhou13/symmetrynet.