 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeParallel Multi-Hypothesis Algorithm for Criticality Estimation in Traffic and Collision Avoidance
Paper and Code

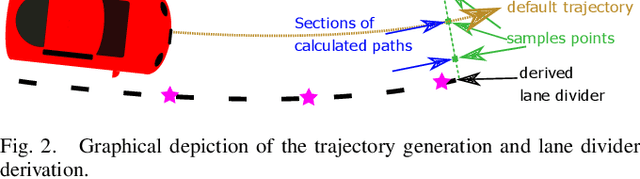
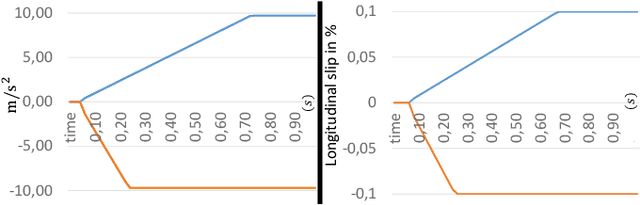
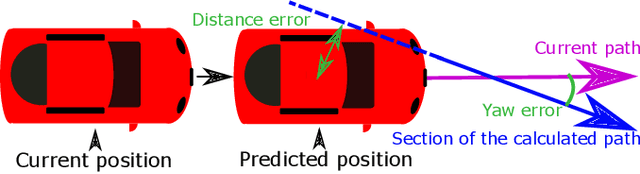
Due to the current developments towards autonomous driving and vehicle active safety, there is an increasing necessity for algorithms that are able to perform complex criticality predictions in real-time. Being able to process multi-object traffic scenarios aids the implementation of a variety of automotive applications such as driver assistance systems for collision prevention and mitigation as well as fall-back systems for autonomous vehicles. We present a fully model-based algorithm with a parallelizable architecture. The proposed algorithm can evaluate the criticality of complex, multi-modal (vehicles and pedestrians) traffic scenarios by simulating millions of trajectory combinations and detecting collisions between objects. The algorithm is able to estimate upcoming criticality at very early stages, demonstrating its potential for vehicle safety-systems and autonomous driving applications. An implementation on an embedded system in a test vehicle proves in a prototypical manner the compatibility of the algorithm with the hardware possibilities of modern cars. For a complex traffic scenario with 11 dynamic objects, more than 86 million pose combinations are evaluated in 21 ms on the GPU of a Drive PX~2.