 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeWhere can I drive? Deep Ego-Corridor Estimation for Robust Automated Driving
Paper and Code
Apr 16, 2020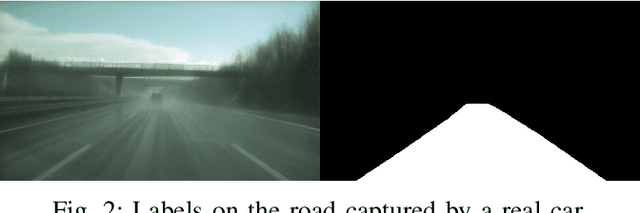
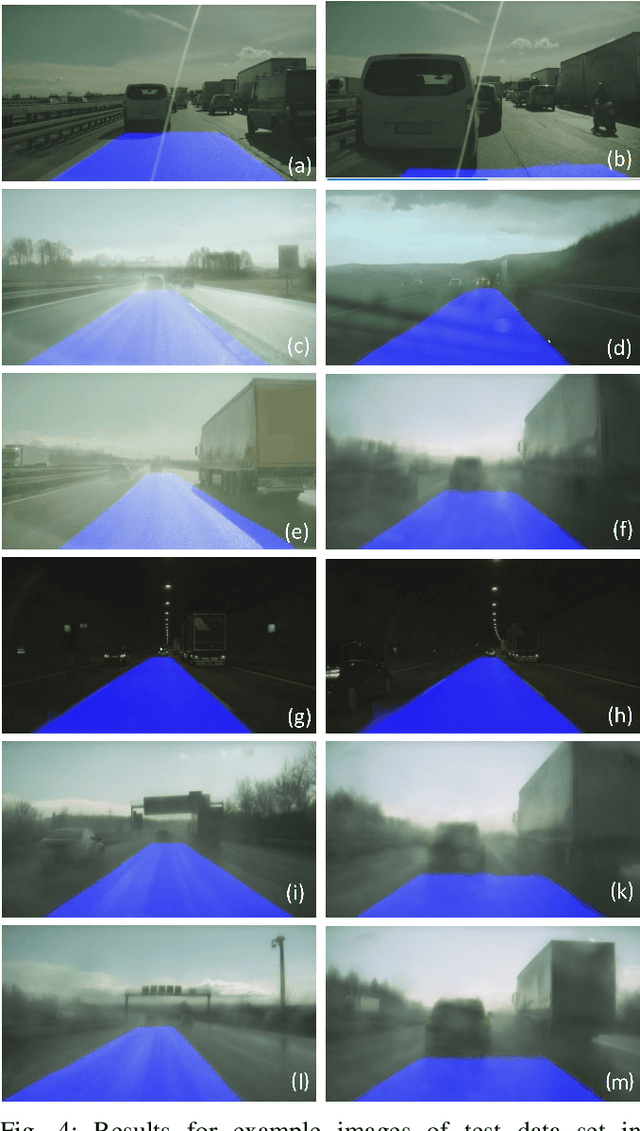

Lane detection is an essential part of the perception module of any automated driving (AD) or advanced driver assistance system (ADAS). So far, model-driven approaches for the detection of lane markings proved sufficient. More recently, however data-driven approaches have been proposed that show superior results. These deep learning approaches typically propose a classification of the free-space using for example semantic segmentation. While these examples focus and optimize on unmarked inner-city roads, we believe that mapless driving in complex highway scenarios is still not handled with sufficient robustness and availability. Especially in challenging weather situations such as heavy rain, fog at night or reflections in puddles, the reliable detection of lane markings will decrease significantly or completely fail with low-cost video-only AD systems. Therefore, we propose to specifically classify a drivable corridor in the ego-lane on a pixel level with a deep learning approach. Our approach is intentionally kept simple with only 660k parameters. Thus, we were able to easily integrate our algorithm into an online AD system of a test vehicle. We demonstrate the performance of our approach under challenging conditions qualitatively and quantitatively in comparison to a state-of-the-art model-driven approach. We see the current approach as a fallback method whenever a model-driven approach cannot cope with a specific scenario. Due to this, a fallback method does not have to fulfill the same requirements on comfort in lateral control as the primary algorithm: Its task is to catch the temporal shortcomings of the main perception task.