Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeThe Kinematics of Tracked Vehicles via the Power Dissipation Method
Paper and Code
Apr 10, 2020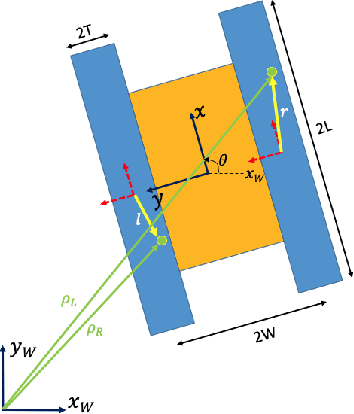
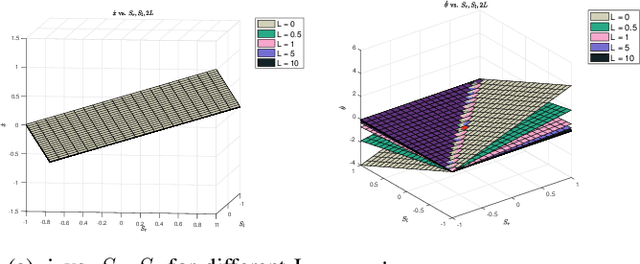
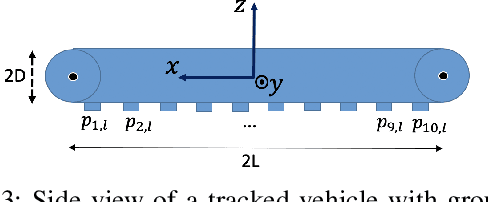
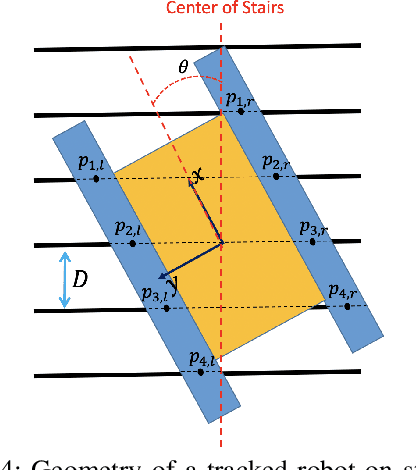
This paper develops a new quasi-static modeling framework for tracked robots based on the power dissipation method. Given a set of track speeds, this method predicts the vehicle's instantaneous rigid body motion. We introduce three specific models: a model for tracked operation on flat ground, a model for vehicle motion when the track's grouser tips touch the ground, and a model for operation on stairs. Experiments show that these models predict tracked vehicle motion more accurately than existing kinematic models, and predict phenomena which are not captured by other models. These novel models provide a basis for new feedback control approaches.
View paper on