 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTake the Scenic Route: Improving Generalization in Vision-and-Language Navigation
Paper and Code
Mar 31, 2020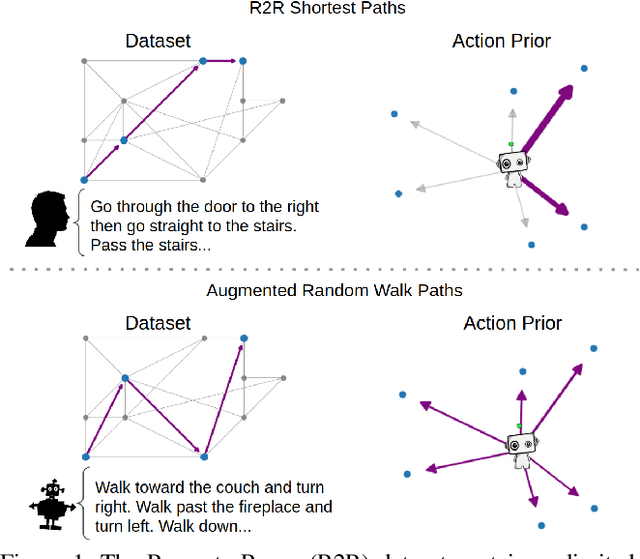
In the Vision-and-Language Navigation (VLN) task, an agent with egocentric vision navigates to a destination given natural language instructions. The act of manually annotating these instructions is timely and expensive, such that many existing approaches automatically generate additional samples to improve agent performance. However, these approaches still have difficulty generalizing their performance to new environments. In this work, we investigate the popular Room-to-Room (R2R) VLN benchmark and discover that what is important is not only the amount of data you synthesize, but also how you do it. We find that shortest path sampling, which is used by both the R2R benchmark and existing augmentation methods, encode biases in the action space of the agent which we dub as action priors. We then show that these action priors offer one explanation toward the poor generalization of existing works. To mitigate such priors, we propose a path sampling method based on random walks to augment the data. By training with this augmentation strategy, our agent is able to generalize better to unknown environments compared to the baseline, significantly improving model performance in the process.