 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMulti-Robot Association-Path Planning in Millimeter-Wave Industrial Scenarios
Paper and Code
Mar 21, 2020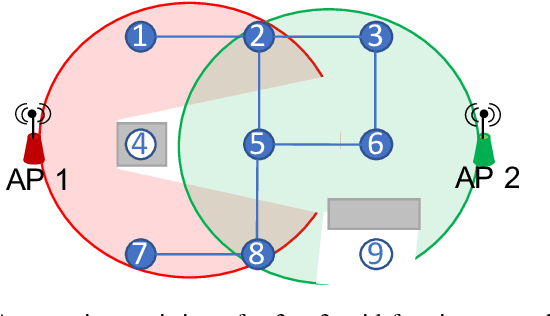
The massive exploitation of robots for industry 4.0 needs advanced wireless solutions that replace less flexible and more costly wired networks. In this regard, millimeter-waves (mm-waves) can provide high data rates, but they are characterized by a spotty coverage requiring dense radio deployments. In such scenarios, coverage holes and numerous handovers may decrease the communication throughput and reliability. In contrast to conventional multi-robot path planning (MPP), we define a type of multi-robot association-path planning (MAPP) problems aiming to jointly optimize the robots' paths and the robots-access points (APs) associations. In MAPP, we focus on minimizing the path lengths as well as the number of handovers while sustaining connectivity. We propose an algorithm that can solve MAPP in polynomial time and it is able to numerically approach the global optimum. We show that the proposed solution is able to guarantee network connectivity and to dramatically reduce the number of handovers in comparison to minimizing only the path lengths.