 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeHybrid aerial ground locomotion with a single passive wheel
Paper and Code
Mar 20, 2020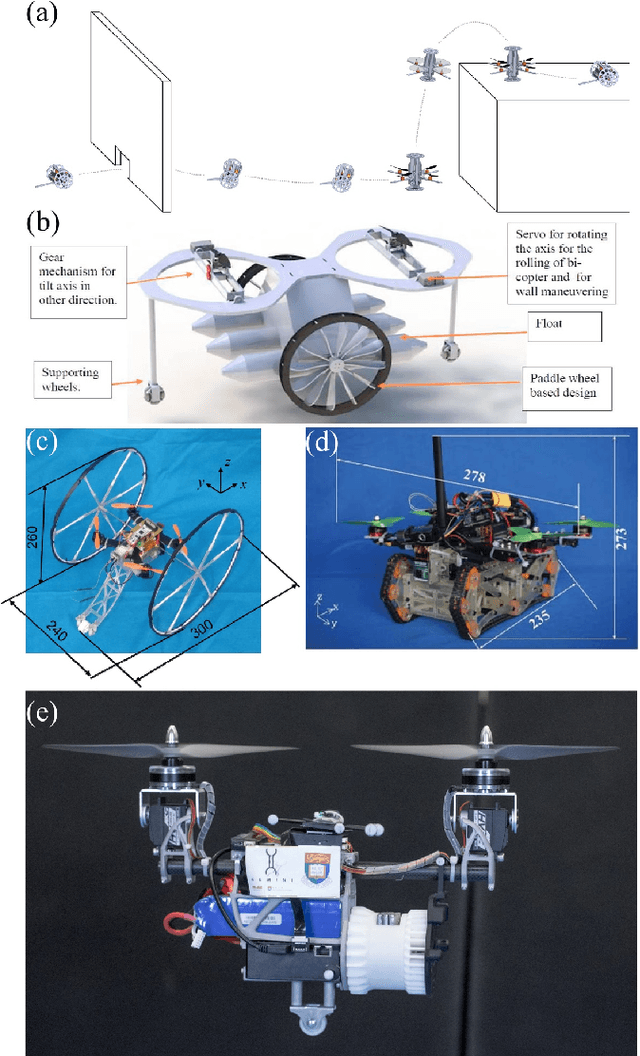
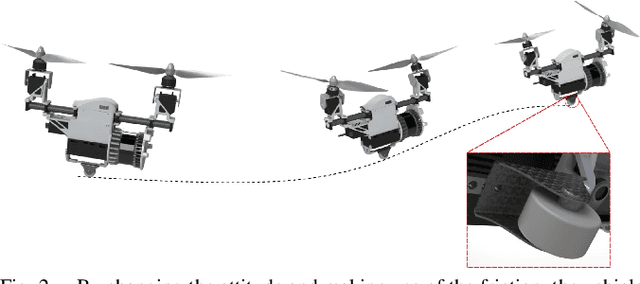
Exploiting contacts with environment structures provides extra force support to a UAV, often reducing the power consumption and hence extending the mission time. This paper investigates one such way to exploit flat surfaces in the environment by a novel aerial-ground hybrid locomotion. Our design is a single passive wheel integrated at the UAV bottom, serving a minimal design to date. We present the principle and implementation of such a simple design as well as its control. Flight experiments are conducted to verify the feasibility and the power saving caused by the ground locomotion. Results show that our minimal design allows successful aerial-ground hybrid locomotion even with a less-controllable bi-copter UAV. The ground locomotion saves up to 77% battery without much tuning effort.