 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAn Active Learning Framework for Constructing High-fidelity Mobility Maps
Paper and Code
Mar 07, 2020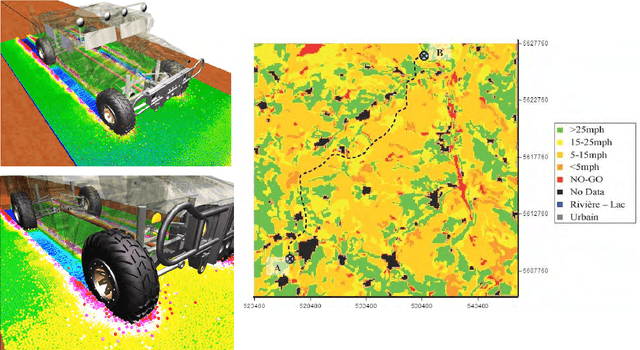
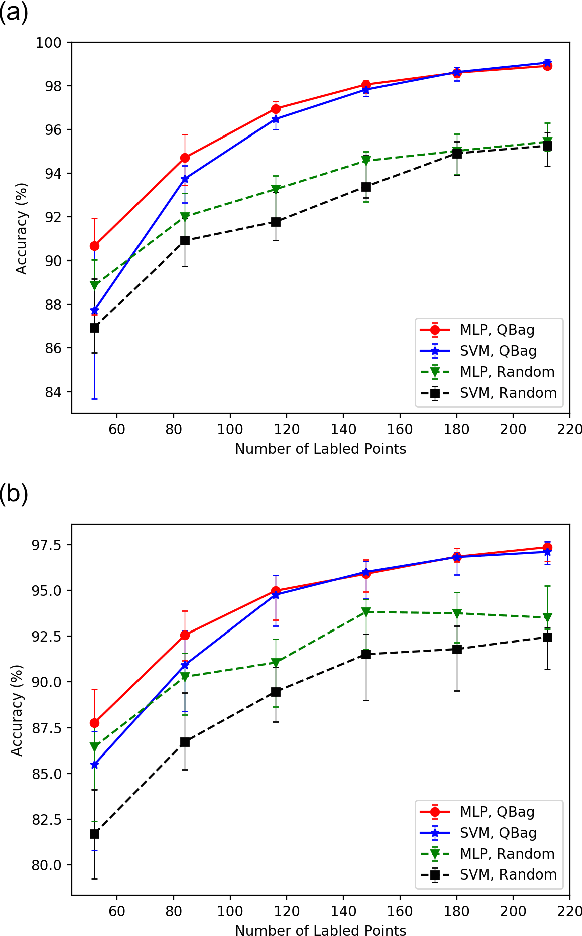
A mobility map, which provides maximum achievable speed on a given terrain, is essential for path planning of autonomous ground vehicles in off-road settings. While physics-based simulations play a central role in creating next-generation, high-fidelity mobility maps, they are cumbersome and expensive. For instance, a typical simulation can take weeks to run on a supercomputer and each map requires thousands of such simulations. Recent work at the U.S. Army CCDC Ground Vehicle Systems Center has shown that trained machine learning classifiers can greatly improve the efficiency of this process. However, deciding which simulations to run in order to train the classifier efficiently is still an open problem. According to PAC learning theory, data that can be separated by a classifier is expected to require $\mathcal{O}(1/\epsilon)$ randomly selected points (simulations) to train the classifier with error less than $\epsilon$. In this paper, building on existing algorithms, we introduce an active learning paradigm that substantially reduces the number of simulations needed to train a machine learning classifier without sacrificing accuracy. Experimental results suggest that our sampling algorithm can train a neural network, with higher accuracy, using less than half the number of simulations when compared to random sampling.