 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMultiplicative Gaussian Particle Filter
Paper and Code

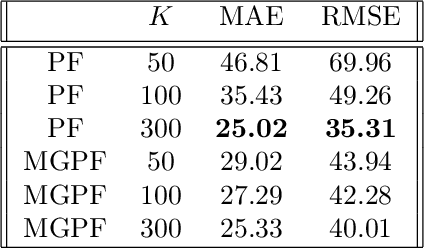
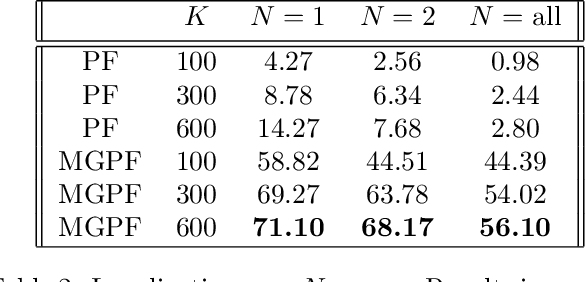
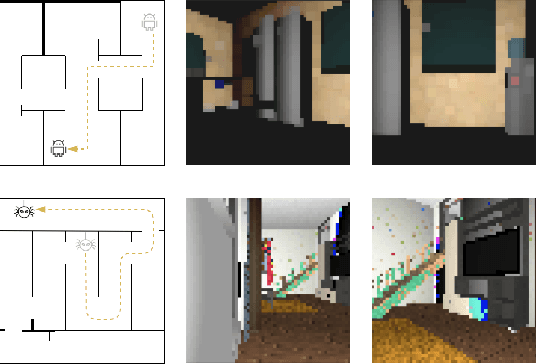
We propose a new sampling-based approach for approximate inference in filtering problems. Instead of approximating conditional distributions with a finite set of states, as done in particle filters, our approach approximates the distribution with a weighted sum of functions from a set of continuous functions. Central to the approach is the use of sampling to approximate multiplications in the Bayes filter. We provide theoretical analysis, giving conditions for sampling to give good approximation. We next specialize to the case of weighted sums of Gaussians, and show how properties of Gaussians enable closed-form transition and efficient multiplication. Lastly, we conduct preliminary experiments on a robot localization problem and compare performance with the particle filter, to demonstrate the potential of the proposed method.