 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePedestrian Models for Autonomous Driving Part I: low level models, from sensing to tracking
Paper and Code
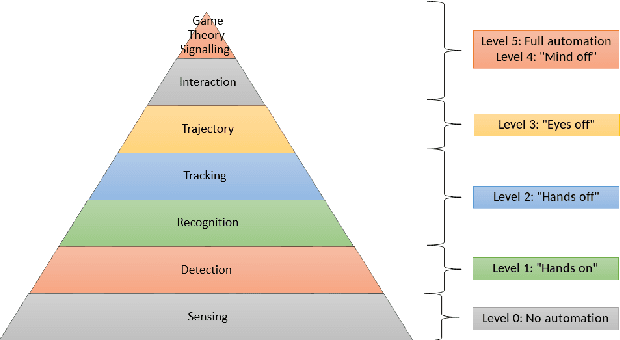

Autonomous vehicles (AVs) must share space with human pedestrians, both in on-road cases such as cars at pedestrian crossings and off-road cases such as delivery vehicles navigating through crowds on high-streets. Unlike static and kinematic obstacles, pedestrians are active agents with complex, interactive motions. Planning AV actions in the presence of pedestrians thus requires modelling of their probable future behaviour as well as detection and tracking which enable such modelling. This narrative review article is Part I of a pair which together survey the current technology stack involved in this process, organising recent research into a hierarchical taxonomy ranging from low level image detection to high-level psychology models, from the perspective of an AV designer. This self-contained Part I covers the lower levels of this stack, from sensing, through detection and recognition, up to tracking of pedestrians. Technologies at these levels are found to be mature and available as foundations for use in higher level systems such as behaviour modelling, prediction and interaction control.