 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeVerifiable RNN-Based Policies for POMDPs Under Temporal Logic Constraints
Paper and Code
Feb 13, 2020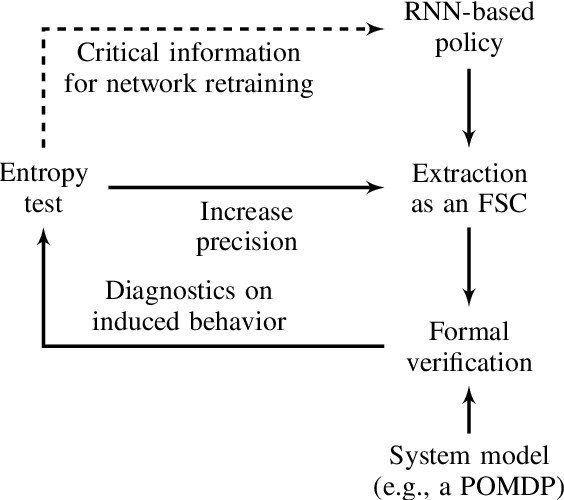
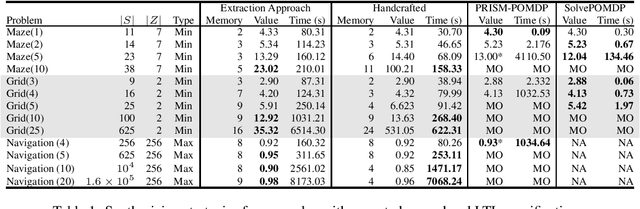
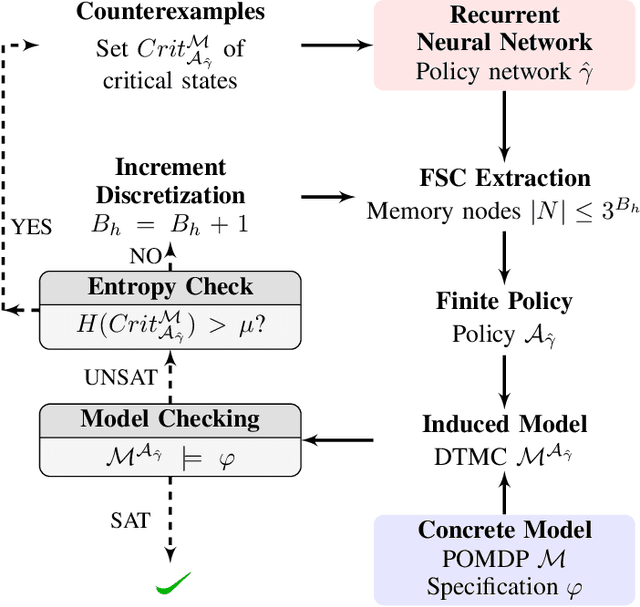
Recurrent neural networks (RNNs) have emerged as an effective representation of control policies in sequential decision-making problems. However, a major drawback in the application of RNN-based policies is the difficulty in providing formal guarantees on the satisfaction of behavioral specifications, e.g. safety and/or reachability. By integrating techniques from formal methods and machine learning, we propose an approach to automatically extract a finite-state controller (FSC) from an RNN, which, when composed with a finite-state system model, is amenable to existing formal verification tools. Specifically, we introduce an iterative modification to the so-called quantized bottleneck insertion technique to create an FSC as a randomized policy with memory. For the cases in which the resulting FSC fails to satisfy the specification, verification generates diagnostic information. We utilize this information to either adjust the amount of memory in the extracted FSC or perform focused retraining of the RNN. While generally applicable, we detail the resulting iterative procedure in the context of policy synthesis for partially observable Markov decision processes (POMDPs), which is known to be notoriously hard. The numerical experiments show that the proposed approach outperforms traditional POMDP synthesis methods by 3 orders of magnitude within 2% of optimal benchmark values.