 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeHierarchical Multi-Process Fusion for Visual Place Recognition
Paper and Code
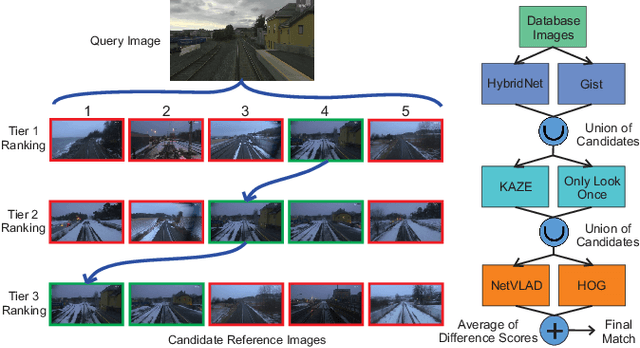
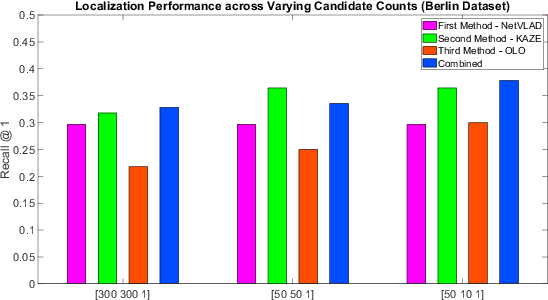
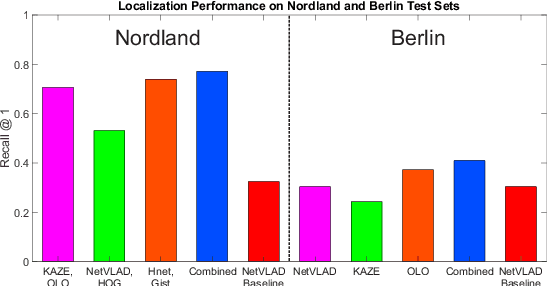
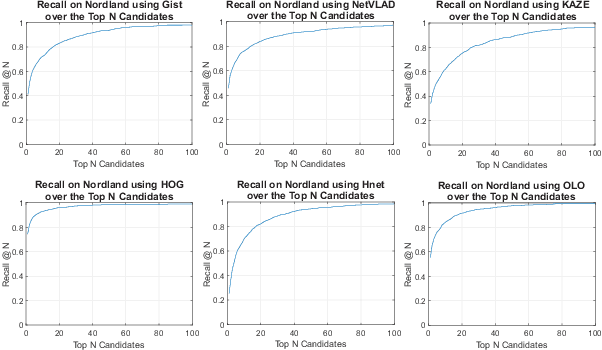
Combining multiple complementary techniques together has long been regarded as a way to improve performance. In visual localization, multi-sensor fusion, multi-process fusion of a single sensing modality, and even combinations of different localization techniques have been shown to result in improved performance. However, merely fusing together different localization techniques does not account for the varying performance characteristics of different localization techniques. In this paper we present a novel, hierarchical localization system that explicitly benefits from three varying characteristics of localization techniques: the distribution of their localization hypotheses, their appearance- and viewpoint-invariant properties, and the resulting differences in where in an environment each system works well and fails. We show how two techniques deployed hierarchically work better than in parallel fusion, how combining two different techniques works better than two levels of a single technique, even when the single technique has superior individual performance, and develop two and three-tier hierarchical structures that progressively improve localization performance. Finally, we develop a stacked hierarchical framework where localization hypotheses from techniques with complementary characteristics are concatenated at each layer, significantly improving retention of the correct hypothesis through to the final localization stage. Using two challenging datasets, we show the proposed system outperforming state-of-the-art techniques.