Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTackling Existence Probabilities of Objects with Motion Planning for Automated Urban Driving
Paper and Code
Feb 04, 2020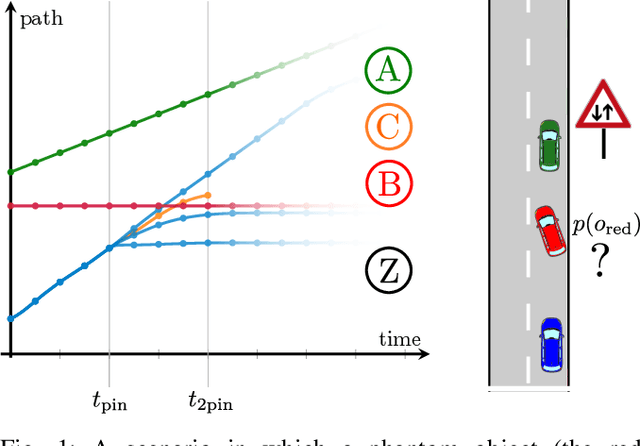
Motion planners take uncertain information about the environment as an input. The environment information is most of the time noisy and has a tendency to contain false positive object detections, rather than false negatives. The state-of-the art motion planning approaches take uncertain state and prediction of objects into account, but fail to distinguish between their existence probabilities. In this paper we present a planning approach that considers the existence probabilities of objects. The proposed approach reacts to falsely detected phantom objects smoothly, and in this way tolerates the faults arising from perception and prediction without performing harsh reactions, unless such reactions are unavoidable for maintaining safety.
* 5 pages, 5 figures
View paper on