 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCounter-example Guided Learning of Bounds on Environment Behavior
Paper and Code
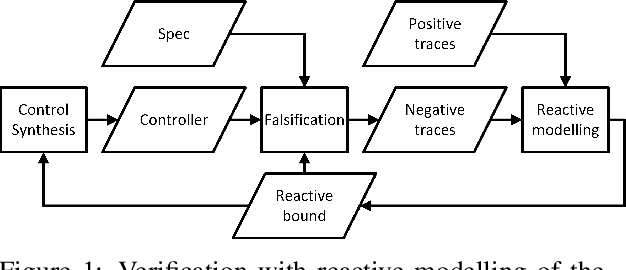
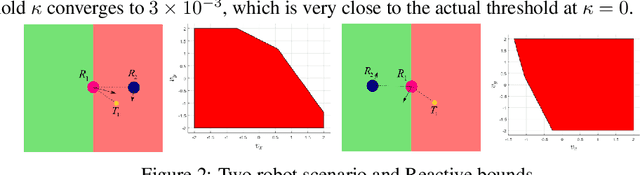
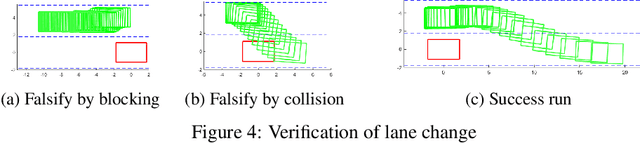
There is a growing interest in building autonomous systems that interact with complex environments. The difficulty associated with obtaining an accurate model for such environments poses a challenge to the task of assessing and guaranteeing the system's performance. We present a data-driven solution that allows for a system to be evaluated for specification conformance without an accurate model of the environment. Our approach involves learning a conservative reactive bound of the environment's behavior using data and specification of the system's desired behavior. First, the approach begins by learning a conservative reactive bound on the environment's actions that captures its possible behaviors with high probability. This bound is then used to assist verification, and if the verification fails under this bound, the algorithm returns counter-examples to show how failure occurs and then uses these to refine the bound. We demonstrate the applicability of the approach through two case-studies: i) verifying controllers for a toy multi-robot system, and ii) verifying an instance of human-robot interaction during a lane-change maneuver given real-world human driving data.