 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTrajectory Forecasts in Unknown Environments Conditioned on Grid-Based Plans
Paper and Code
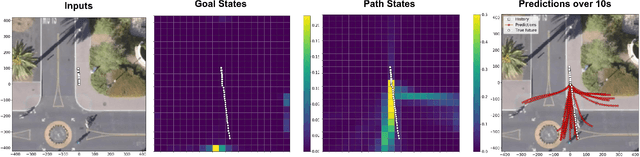
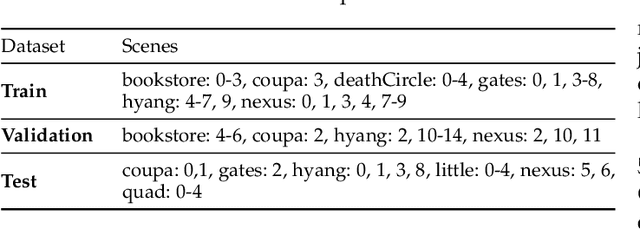
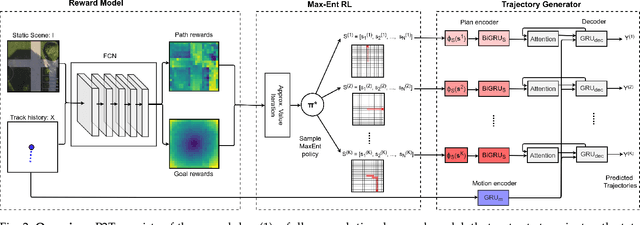
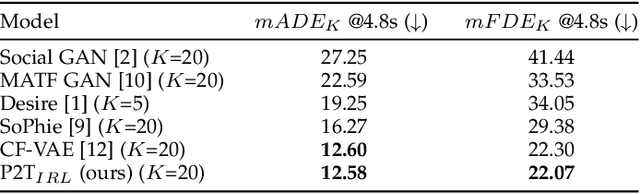
In this paper, we address the problem of forecasting agent trajectories in unknown environments, conditioned on their past motion and scene structure. Trajectory forecasting is a challenging problem due to the large variation in scene structure, and the multi-modal nature of the distribution of future trajectories. Unlike prior approaches that directly learn one-to-many mappings from observed context, to multiple future trajectories, we propose to condition trajectory forecasts on \textit{plans} sampled from a grid based policy learned using maximum entropy inverse reinforcement learning policy (MaxEnt IRL). We reformulate MaxEnt IRL to allow the policy to jointly infer plausible agent goals and paths to those goals on a coarse 2-D grid defined over an unknown scene. We propose an attention based trajectory generator that generates continuous valued future trajectories conditioned on state sequences sampled from the MaxEnt policy. Quantitative and qualitative evaluation on the publicly available Stanford drone dataset (SDD) shows that our model generates trajectories that are (1) diverse, representing the multi-modal predictive distribution, and (2) precise, conforming to the underlying scene structure over long prediction horizons, achieving state of the art results on the TrajNet benchmark split of SDD.