 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeIRS: A Large Synthetic Indoor Robotics Stereo Dataset for Disparity and Surface Normal Estimation
Paper and Code
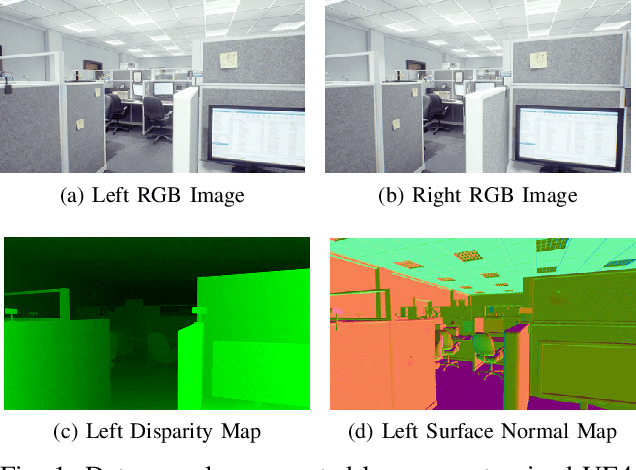
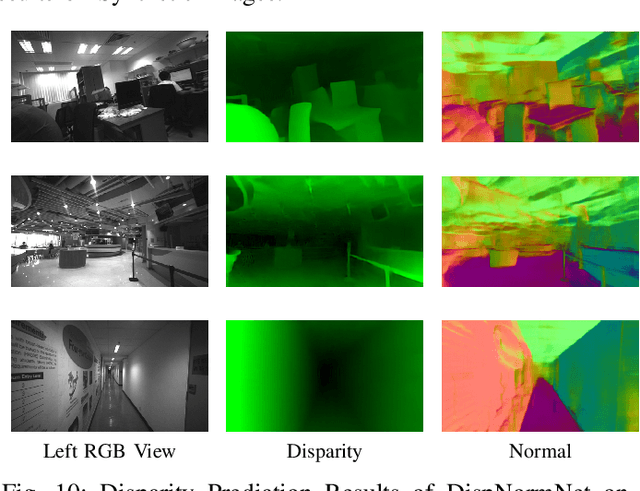
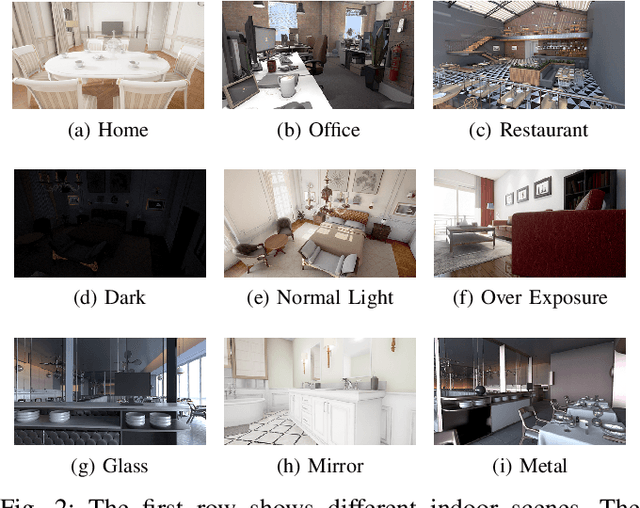
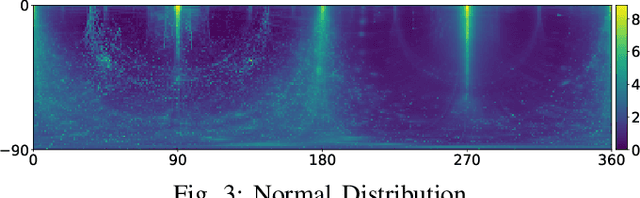
Indoor robotics localization, navigation and interaction heavily rely on scene understanding and reconstruction. Compared to monocular vision which usually does not explicitly introduce any geometrical constraint, stereo vision based schemes are more promising and robust to produce accurate geometrical information, such as surface normal and depth/disparity. Besides, deep learning models trained with large-scale datasets have shown their superior performance in many stereo vision tasks. However, existing stereo datasets rarely contain the high-quality surface normal and disparity ground truth, which hardly satisfy the demand of training a prospective deep model for indoor scenes. To this end, we introduce a large-scale synthetic indoor robotics stereo (IRS) dataset with over 100K stereo RGB images and high-quality surface normal and disparity maps. Leveraging the advanced rendering techniques of our customized rendering engine, the dataset is considerably close to the real-world captured images and covers several visual effects, such as brightness changes, light reflection/transmission, lens flare, vivid shadow, etc. We compare the data distribution of IRS with existing stereo datasets to illustrate the typical visual attributes of indoor scenes. In addition, we present a new deep model DispNormNet to simultaneously infer surface normal and disparity from stereo images. Compared to existing models trained on other datasets, DispNormNet trained with IRS produces much better estimation of surface normal and disparity for indoor scenes.