 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeWM-INS: A Wheel Mounted IMU Based Integrated Navigation System for Wheeled Robots
Paper and Code
Dec 29, 2019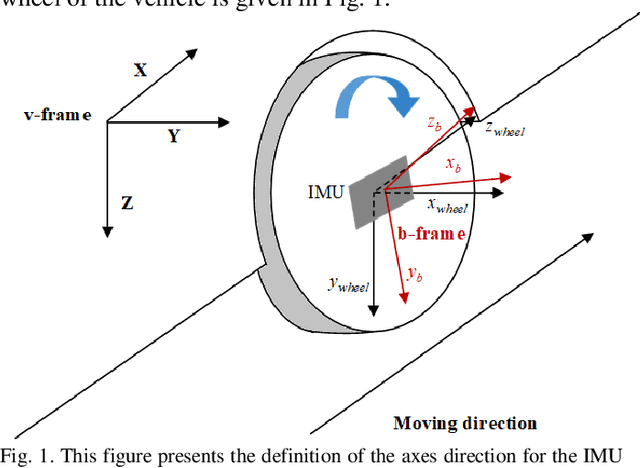
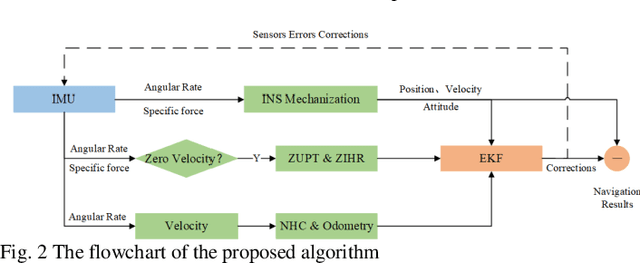
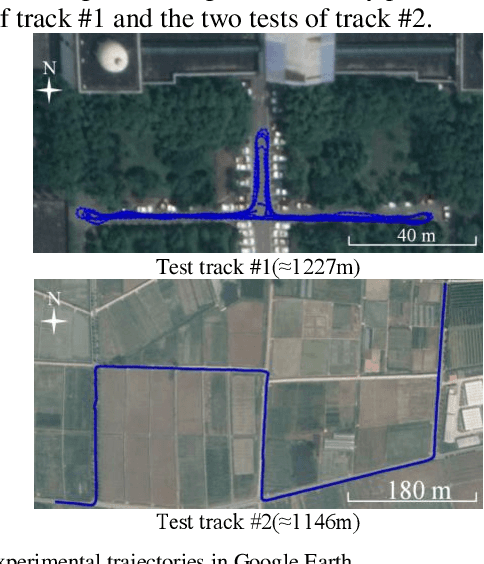
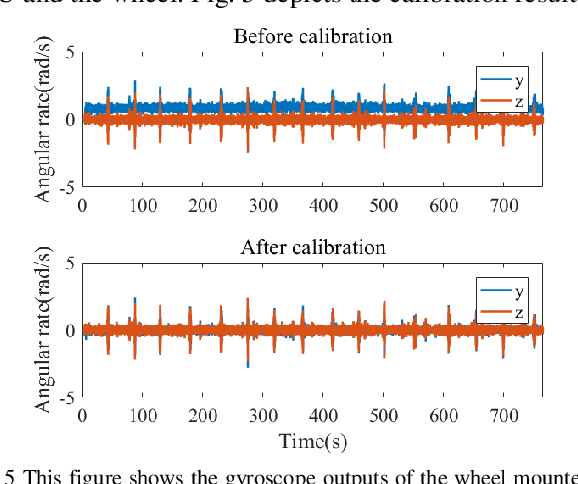
Microelectromechanical systems (MEMS) based inertial navigation systems (INS) are widely used for robot navigation as they are self-contained and low-cost for motion perception. Various methods have been utilized to restrict the error growth caused by the inherent inertial sensor noises. Inspired by the rotation-modulation INS that using intentional rotation to mitigate the drift errors, we propose an integrated navigation solution for mobile robots based on a single wheel mounted MEMS IMU. The IMU is leveraged to produce odometry measurements with wheel radius and estimate the wheel motion. Zero-type constraints and the vehicle motion constraints are also introduced to limit the navigation errors. Field experiments prove that the rotation scheme can effectively reduce the heading error. The horizontal position accuracy of the proposed system is two times better than the conventional odometry aided INS for large-scale polyline trajectory tests. The cancellation effect of the track on navigation errors drift is also illustrated.