 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDeep Multivariate Mixture of Gaussians for Object Detection under Occlusion
Paper and Code
Nov 24, 2019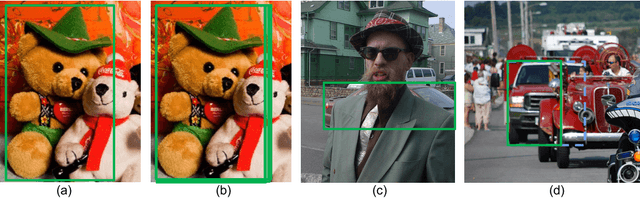
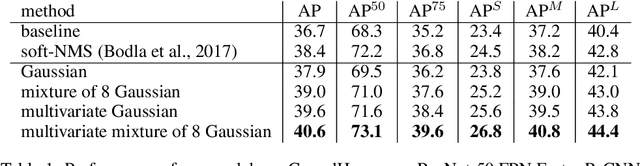
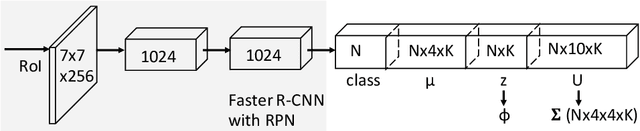

In this paper, we consider the problem of detecting object under occlusion. Most object detectors formulate bounding box regression as a unimodal task (i.e., regressing a single set of bounding box coordinates independently). However, we observe that the bounding box borders of an occluded object can have multiple plausible configurations. Also, the occluded bounding box borders have correlations with visible ones. Motivated by these two observations, we propose a deep multivariate mixture of Gaussians model for bounding box regression under occlusion. The mixture components potentially learn different configurations of an occluded part, and the covariances between variates help to learn the relationship between the occluded parts and the visible ones. Quantitatively, our model improves the AP of the baselines by 3.9% and 1.2% on CrowdHuman and MS-COCO respectively with almost no computational or memory overhead. Qualitatively, our model enjoys explainability since we can interpret the resulting bounding boxes via the covariance matrices and the mixture components.