 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRobust Model Predictive Shielding for Safe Reinforcement Learning with Stochastic Dynamics
Paper and Code
Oct 24, 2019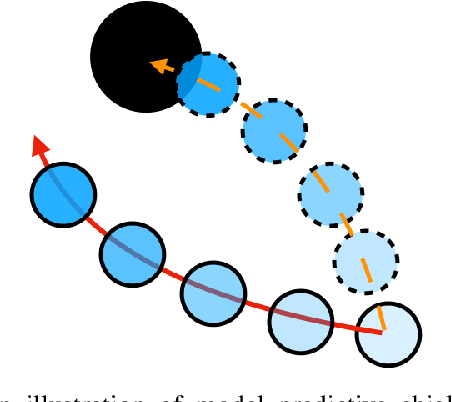
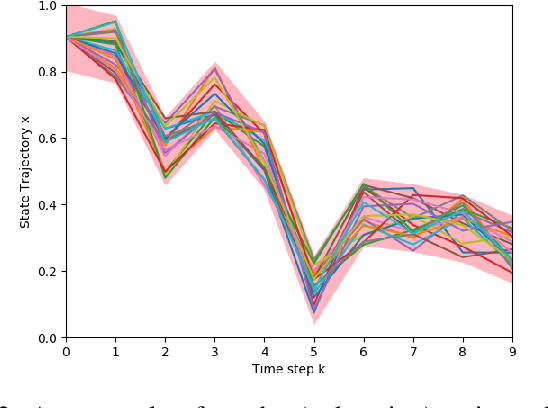
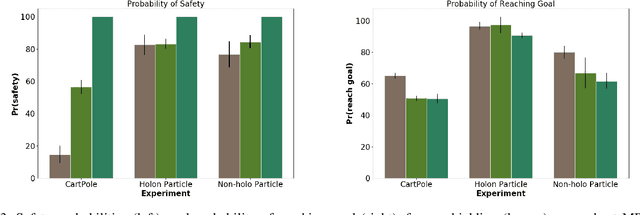
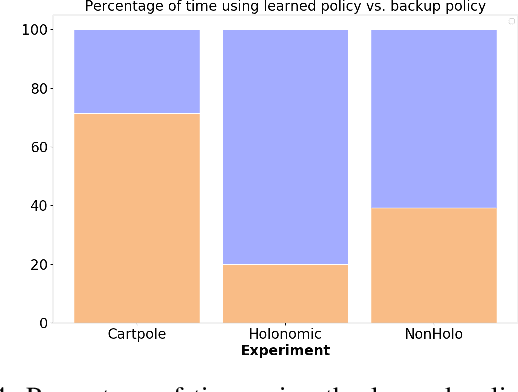
This paper proposes a framework for safe reinforcement learning that can handle stochastic nonlinear dynamical systems. We focus on the setting where the nominal dynamics are known, and are subject to additive stochastic disturbances with known distribution. Our goal is to ensure the safety of a control policy trained using reinforcement learning, e.g., in a simulated environment. We build on the idea of model predictive shielding (MPS), where a backup controller is used to override the learned policy as needed to ensure safety. The key challenge is how to compute a backup policy in the context of stochastic dynamics. We propose to use a tube-based robust NMPC controller as the backup controller. We estimate the tubes using sampled trajectories, leveraging ideas from statistical learning theory to obtain high-probability guarantees. We empirically demonstrate that our approach can ensure safety in stochastic systems, including cart-pole and a non-holonomic particle with random obstacles.