 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSolving Rubik's Cube with a Robot Hand
Paper and Code
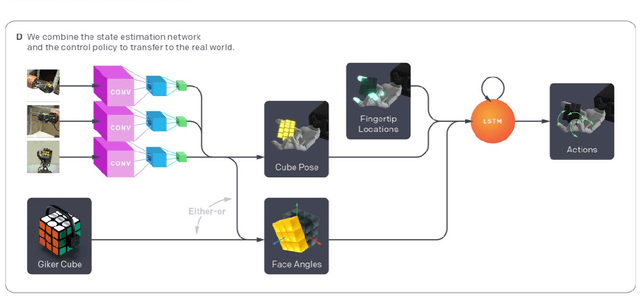
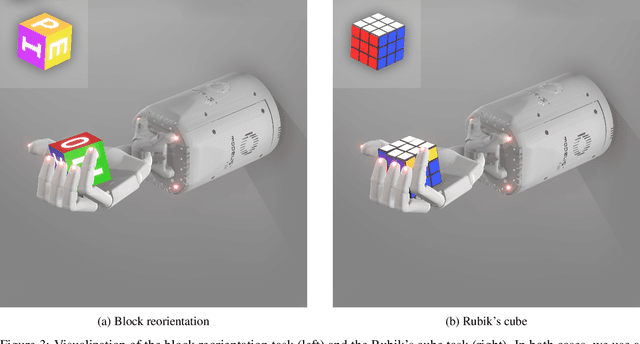
We demonstrate that models trained only in simulation can be used to solve a manipulation problem of unprecedented complexity on a real robot. This is made possible by two key components: a novel algorithm, which we call automatic domain randomization (ADR) and a robot platform built for machine learning. ADR automatically generates a distribution over randomized environments of ever-increasing difficulty. Control policies and vision state estimators trained with ADR exhibit vastly improved sim2real transfer. For control policies, memory-augmented models trained on an ADR-generated distribution of environments show clear signs of emergent meta-learning at test time. The combination of ADR with our custom robot platform allows us to solve a Rubik's cube with a humanoid robot hand, which involves both control and state estimation problems. Videos summarizing our results are available: https://openai.com/blog/solving-rubiks-cube/