 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTrajectory Planning for Autonomous Parking in Complex Environments: A Tunnel-based Optimal Control Approach
Paper and Code
Oct 11, 2019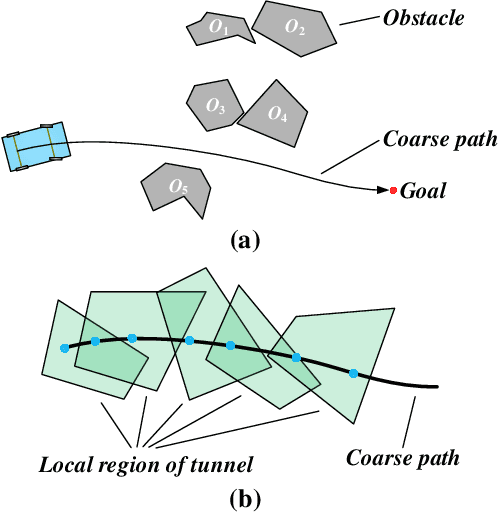
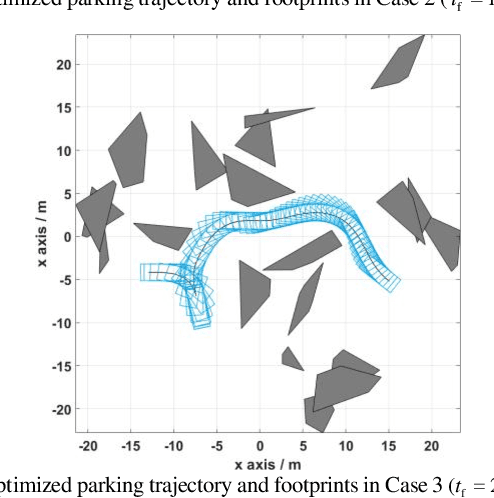
This paper proposes a fast and accurate trajectory planning algorithm for autonomous parking. Nominally, an optimal control problem should be formulated to describe this scheme, but the dimensionality of the optimal control problem is usually large, because the vehicle needs to avoid collision with every obstacle at every moment during the entire dynamic process. Although an initial guess obtained by a sample-and-search based planner facilitates the numerical optimization process, it is still far from being as fast as real-time. To address this issue, we replace all of the collision-avoidance constraints by series of within-tunnel conditions. Concretely, we develop a tunnel-based strategy such that the vehicle is restricted to move within the tunnels which naturally separate the vehicle from the obstacles. Unification, efficiency, and robustness of the proposed trajectory planning method have been verified by simulations.