 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Novel Adaptive Controller for Robot Manipulators based on Active Inference
Paper and Code
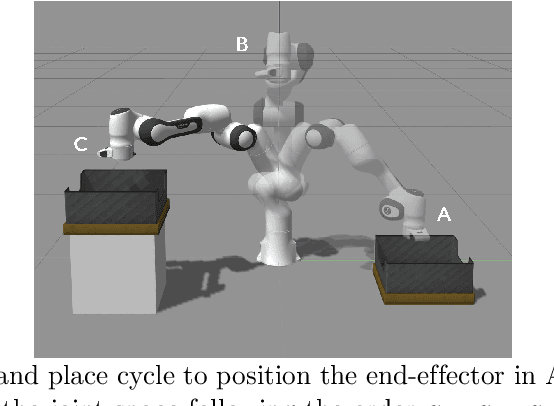
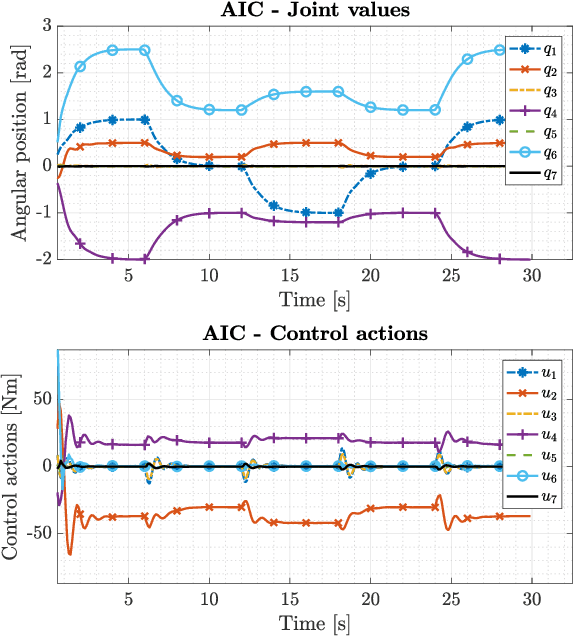
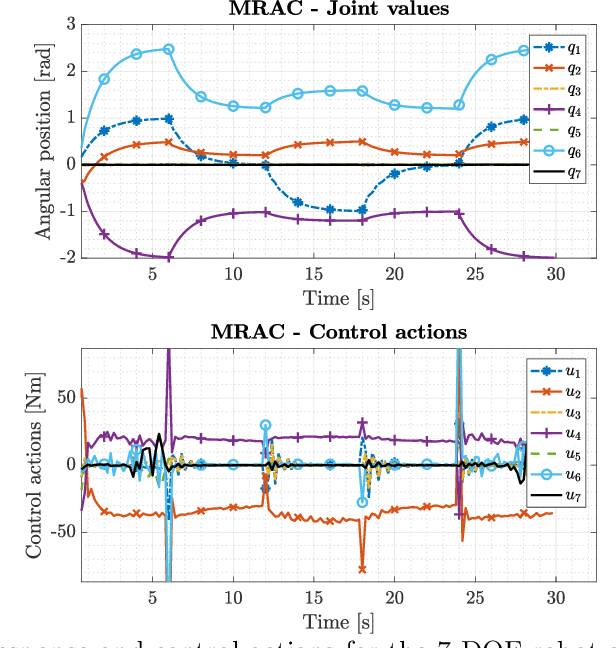
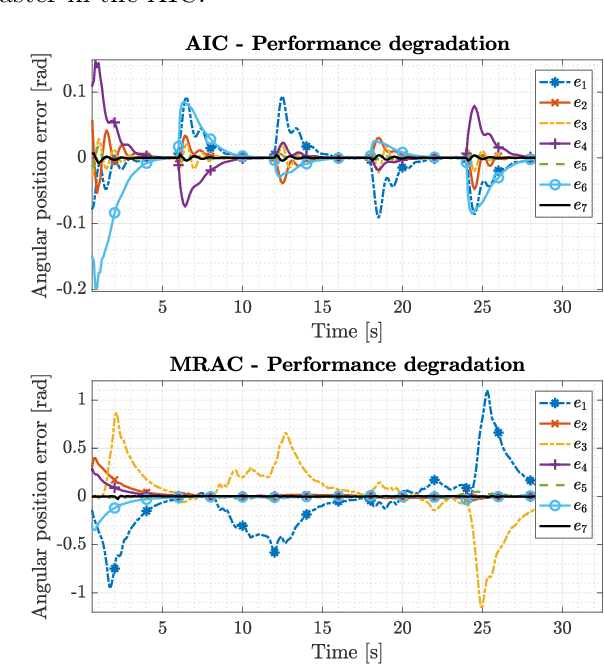
More adaptive controllers for robot manipulators are needed, which can deal with large model uncertainties. This paper presents a novel active inference controller (AIC) as an adaptive control scheme for industrial robots. This scheme is easily scalable to high degrees-of-freedom, and it maintains high performance even in the presence of large unmodeled dynamics. The proposed method is based on active inference, a promising neuroscientific theory of the brain, which describes a biologically plausible algorithm for perception and action. In this work, we formulate active inference from a control perspective, deriving a model-free control law which is less sensitive to unmodeled dynamics. The performance and the adaptive properties of the algorithm are compared to a state-of-the-art model reference adaptive controller (MRAC) in an experimental setup with a real 7-DOF robot arm. The results showed that the AIC outperformed the MRAC in terms of adaptability, providing a more general control law for robot manipulators. This confirmed the relevance of active inference for robot control.