Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA fast, complete, point cloud based loop closure for LiDAR odometry and mapping
Paper and Code
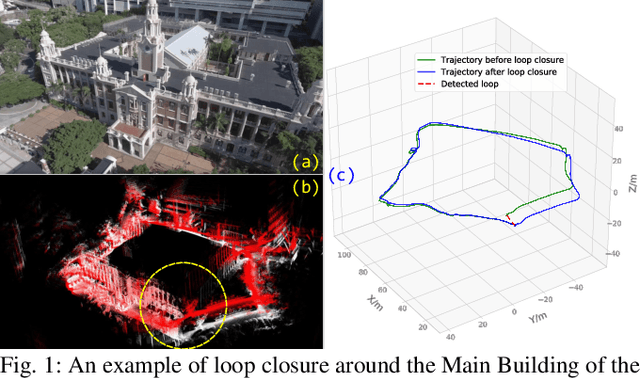
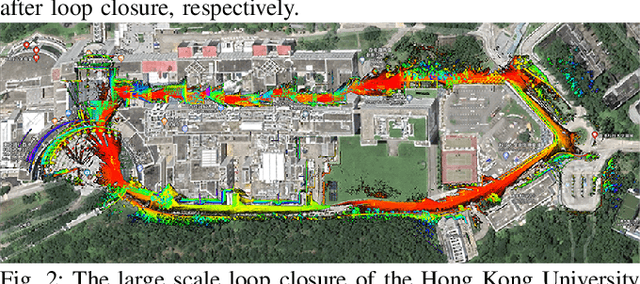
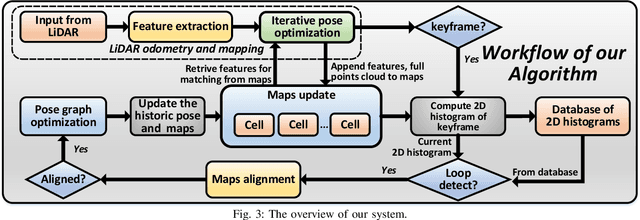
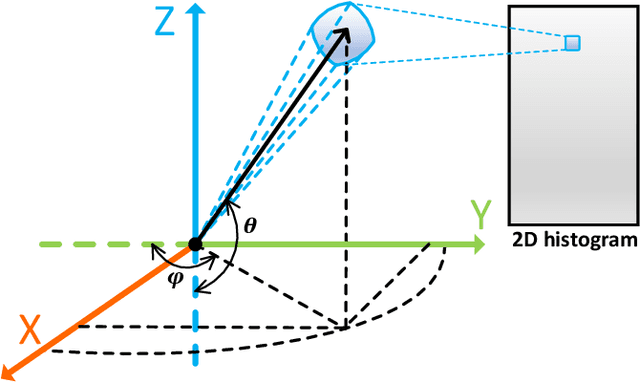
This paper presents a loop closure method to correct the long-term drift in LiDAR odometry and mapping (LOAM). Our proposed method computes the 2D histogram of keyframes, a local map patch, and uses the normalized cross-correlation of the 2D histograms as the similarity metric between the current keyframe and those in the map. We show that this method is fast, invariant to rotation, and produces reliable and accurate loop detection. The proposed method is implemented with careful engineering and integrated into the LOAM algorithm, forming a complete and practical system ready to use. To benefit the community by serving a benchmark for loop closure, the entire system is made open source on Github
View paper on