 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMulti-agent Interactive Prediction under Challenging Driving Scenarios
Paper and Code
Sep 24, 2019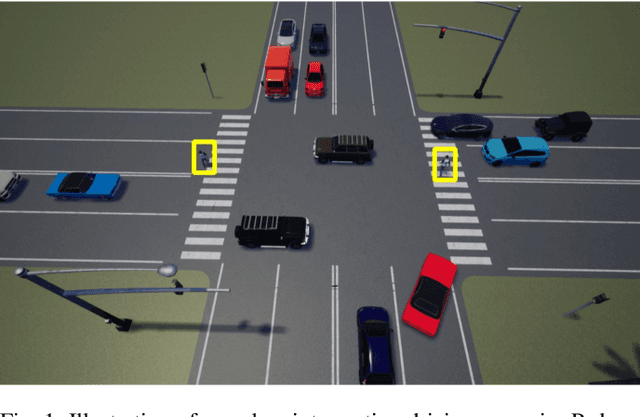
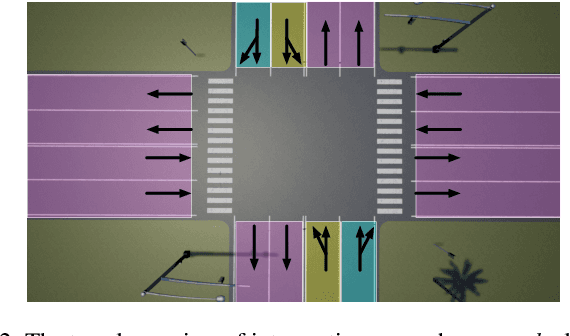
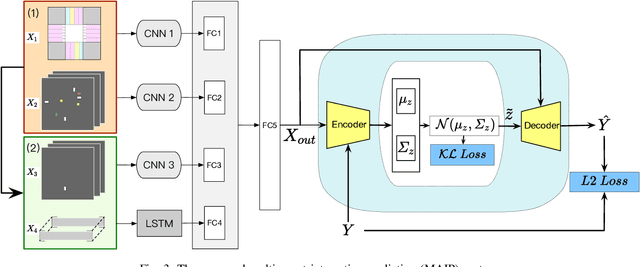
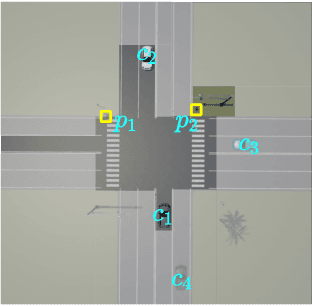
In order to drive safely on the road, autonomous vehicle is expected to predict future outcomes of its surrounding environment and react properly. In fact, many researchers have been focused on solving behavioral prediction problems for autonomous vehicles. However, very few of them consider multi-agent prediction under challenging driving scenarios such as urban environment. In this paper, we proposed a prediction method that is able to predict various complicated driving scenarios where heterogeneous road entities, signal lights, and static map information are taken into account. Moreover, the proposed multi-agent interactive prediction (MAIP) system is capable of simultaneously predicting any number of road entities while considering their mutual interactions. A case study of a simulated challenging urban intersection scenario is provided to demonstrate the performance and capability of the proposed prediction system.