 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeHighly Dynamic Quadruped Locomotion via Whole-Body Impulse Control and Model Predictive Control
Paper and Code
Sep 14, 2019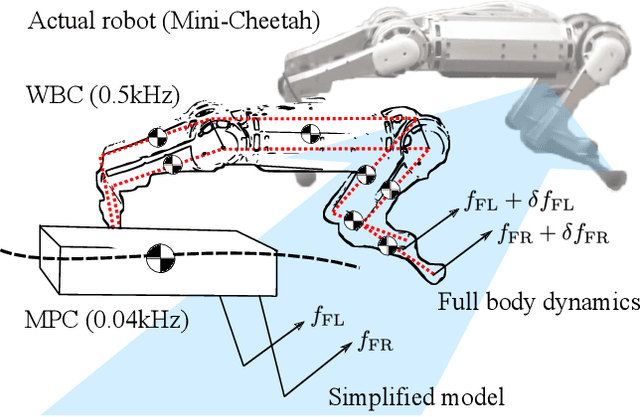
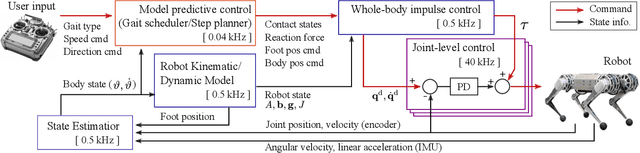
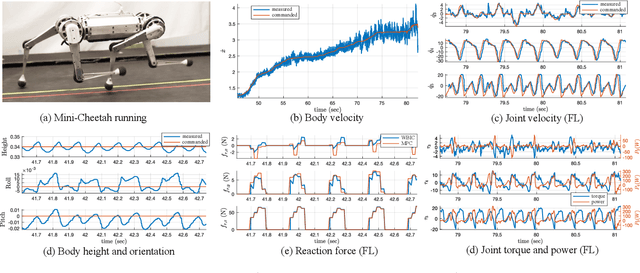
Dynamic legged locomotion is a challenging topic because of the lack of established control schemes which can handle aerial phases, short stance times, and high-speed leg swings. In this paper, we propose a controller combining whole-body control (WBC) and model predictive control (MPC). In our framework, MPC finds an optimal reaction force profile over a longer time horizon with a simple model, and WBC computes joint torque, position, and velocity commands based on the reaction forces computed from MPC. Unlike existing WBCs, which attempt to track commanded body trajectories, our controller is focused more on the reaction force command, which allows it to accomplish high speed dynamic locomotion with aerial phases. The newly devised WBC is integrated with MPC and tested on the Mini-Cheetah quadruped robot. To demonstrate the robustness and versatility, the controller is tested on six different gaits in a number of different environments, including outdoors and on a treadmill, reaching a top speed of 3.7 m/s.