 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSelf-driving scale car trained by Deep reinforcement Learning
Paper and Code
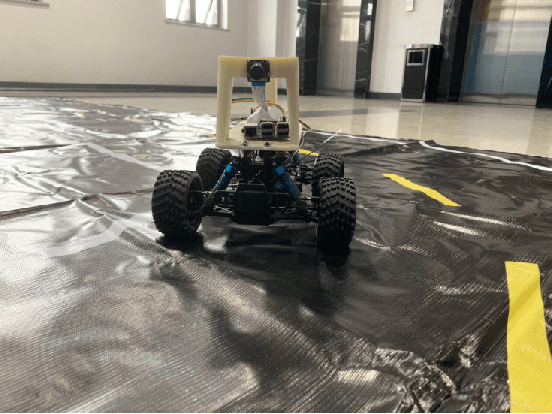
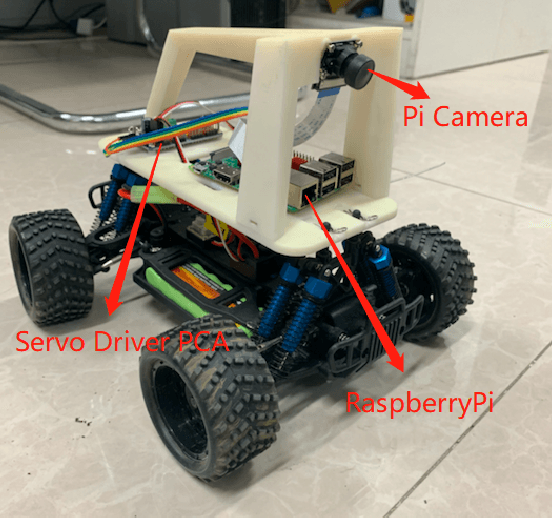
This paper considers the problem of self-driving algorithm based on deep learning. This is a hot topic because self-driving is the most important application field of artificial intelligence. Existing work focused on deep learning which has the ability to learn end-to-end self-driving control directly from raw sensory data, but this method is just a mapping between images and driving. We prefer deep reinforcement learning to train a self-driving car in a virtual simulation environment created by Unity and then migrate to reality. Deep reinforcement learning makes the machine own the driving descision-making ability like human. The virtual to realistic training method can efficiently handle the problem that reinforcement learning requires reward from the environment which probably cause cars damge. We have derived a theoretical model and analysis on how to use Deep Q-learning to control a car to drive. We have carried out simulations in the Unity virtual environment for evaluating the performance. Finally, we successfully migrate te model to the real world and realize self-driving.