 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeHybrid Camera Pose Estimation with Online Partitioning
Paper and Code
Aug 05, 2019
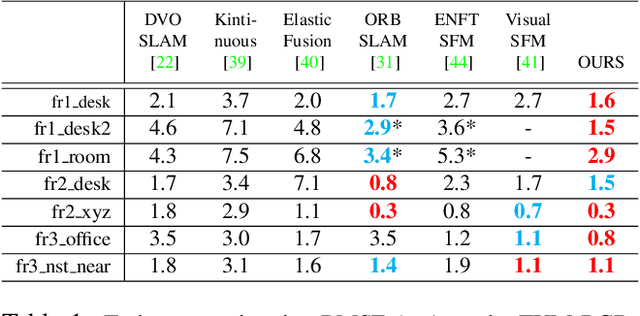
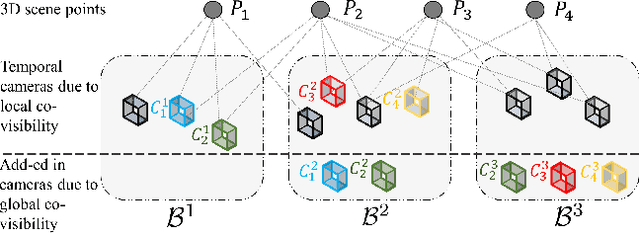
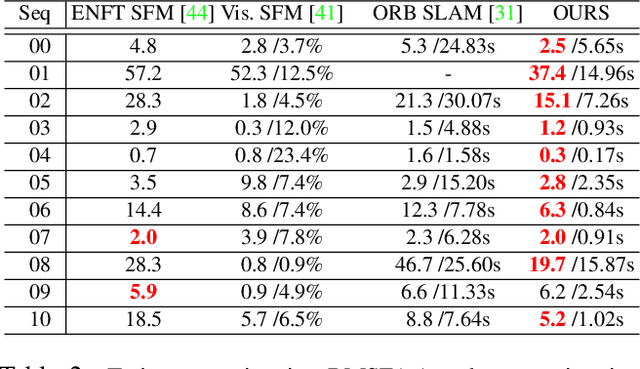
This paper presents a hybrid real-time camera pose estimation framework with a novel partitioning scheme and introduces motion averaging to on-line monocular systems. Breaking through the limitations of fixed-size temporal partitioning in most conventional pose estimation mechanisms, the proposed approach significantly improves the accuracy of local bundle adjustment by gathering spatially-strongly-connected cameras into each block. With the dynamic initialization using intermediate computation values, our proposed self-adaptive Levenberg-Marquardt solver achieves a quadratic convergence rate to further enhance the efficiency of the local optimization. Moreover, the dense data association between blocks by virtue of our co-visibility-based partitioning enables us to explore and implement motion averaging to efficiently align the blocks globally, updating camera motion estimations on-the-fly. Experiment results on benchmarks convincingly demonstrate the practicality and robustness of our proposed approach by outperforming conventional bundle adjustment by orders of magnitude.