 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeGeneric Prediction Architecture Considering both Rational and Irrational Driving Behaviors
Paper and Code
Jul 23, 2019

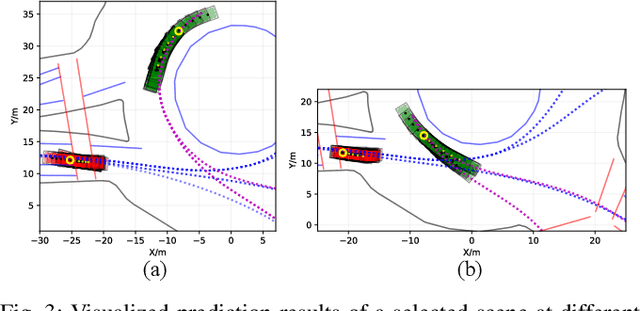
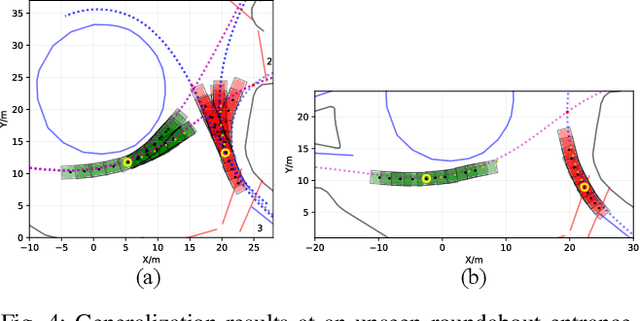
Accurately predicting future behaviors of surrounding vehicles is an essential capability for autonomous vehicles in order to plan safe and feasible trajectories. The behaviors of others, however, are full of uncertainties. Both rational and irrational behaviors exist, and the autonomous vehicles need to be aware of this in their prediction module. The prediction module is also expected to generate reasonable results in the presence of unseen and corner scenarios. Two types of prediction models are typically used to solve the prediction problem: learning-based model and planning-based model. Learning-based model utilizes real driving data to model the human behaviors. Depending on the structure of the data, learning-based models can predict both rational and irrational behaviors. But the balance between them cannot be customized, which creates challenges in generalizing the prediction results. Planning-based model, on the other hand, usually assumes human as a rational agent, i.e., it anticipates only rational behavior of human drivers. In this paper, a generic prediction architecture is proposed to address various rationalities in human behavior. We leverage the advantages from both learning-based and planning-based prediction models. The proposed approach is able to predict continuous trajectories that well-reflect possible future situations of other drivers. Moreover, the prediction performance remains stable under various unseen driving scenarios. A case study under a real-world roundabout scenario is provided to demonstrate the performance and capability of the proposed prediction architecture.