 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeGeneralized Multiple Correlation Coefficient as a Similarity Measurements between Trajectories
Paper and Code
Jul 05, 2019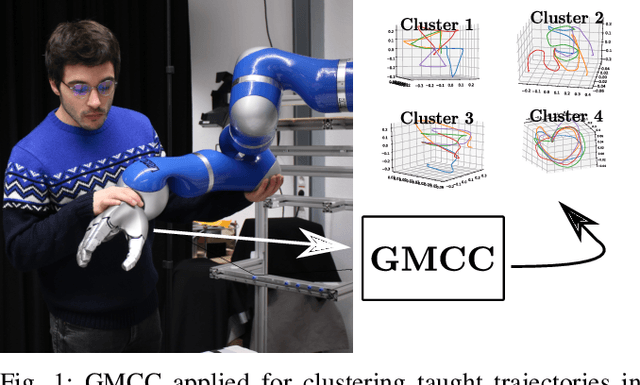
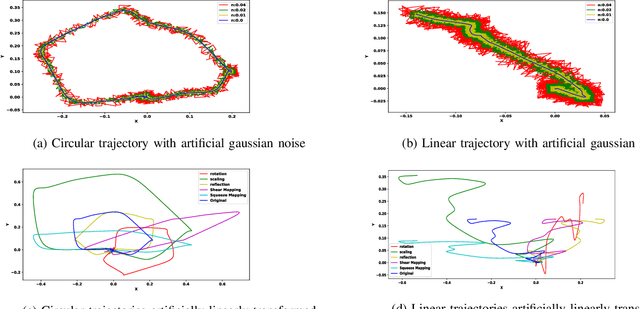
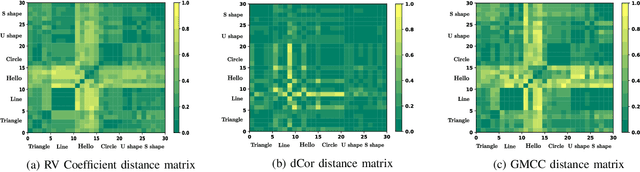
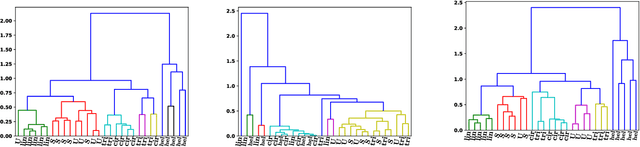
Similarity distance measure between two trajectories is an essential tool to understand patterns in motion, for example, in Human-Robot Interaction or Imitation Learning. The problem has been faced in many fields, from Signal Processing, Probabilistic Theory field, Topology field or Statistics field.Anyway, up to now, none of the trajectory similarity measurements metrics are invariant to all possible linear transformation of the trajectories (rotation, scaling, reflection, shear mapping or squeeze mapping). Also not all of them are robust in front of noisy signals or fast enough for real-time trajectory classification. To overcome this limitation this paper proposes a similarity distance metric that will remain invariant in front of any possible linear transformation.Based on Pearson Correlation Coefficient and the Coefficient of Determination, our similarity metric, the Generalized Multiple Correlation Coefficient (GMCC) is presented like the natural extension of the Multiple Correlation Coefficient. The motivation of this paper is two fold. First, to introduce a new correlation metric that presents the best properties to compute similarities between trajectories invariant to linear transformations and compare it with some state of the art similarity distances.Second, to present a natural way of integrating the similarity metric in an Imitation Learning scenario for clustering robot trajectories.