 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeWeather Influence and Classification with Automotive Lidar Sensors
Paper and Code
Jun 18, 2019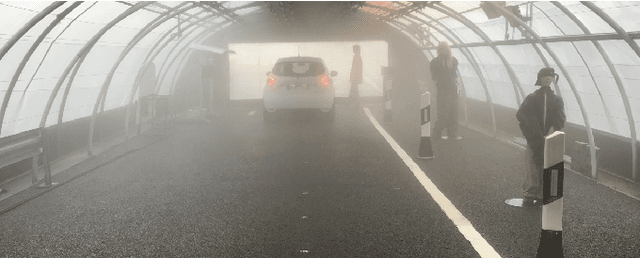
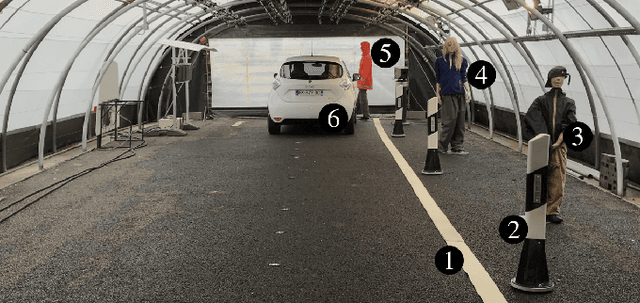
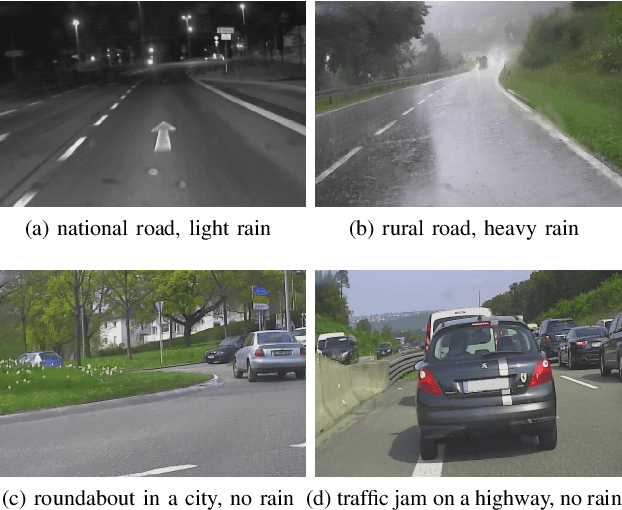
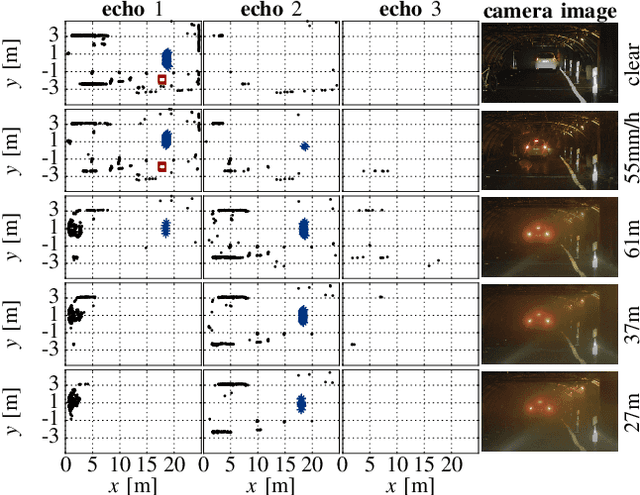
Lidar sensors are often used in mobile robots and autonomous vehicles to complement camera, radar and ultrasonic sensors for environment perception. Typically, perception algorithms are trained to only detect moving and static objects as well as ground estimation, but intentionally ignore weather effects to reduce false detections. In this work, we present an in-depth analysis of automotive lidar performance under harsh weather conditions, i.e. heavy rain and dense fog. An extensive data set has been recorded for various fog and rain conditions, which is the basis for the conducted in-depth analysis of the point cloud under changing environmental conditions. In addition, we introduce a novel approach to detect and classify rain or fog with lidar sensors only and achieve an mean union over intersection of 97.14 % for a data set in controlled environments. The analysis of weather influences on the performance of lidar sensors and the weather detection are important steps towards improving safety levels for autonomous driving in adverse weather conditions by providing reliable information to adapt vehicle behavior.