Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeEmbracing Contact: Pushing Multiple Objects with Robot's Forearm
Paper and Code
Jun 17, 2019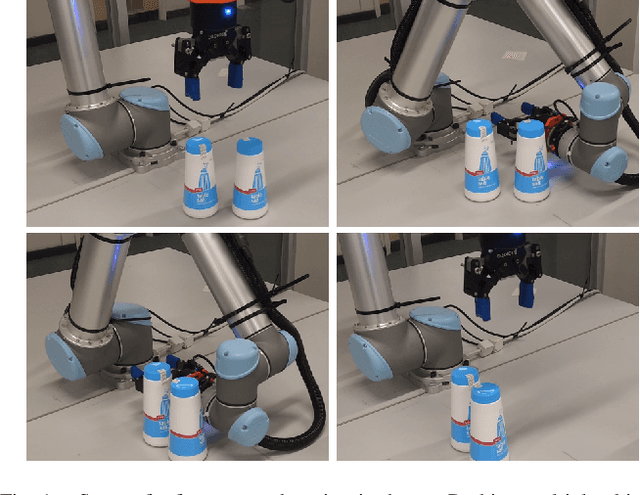
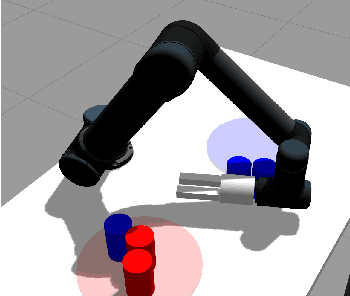
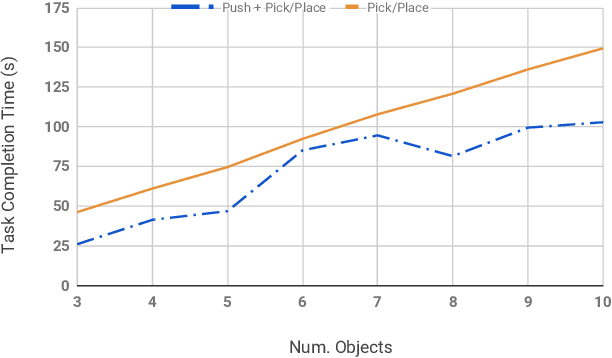
Grasping is the dominant approach for robot manipulation, but only a single object can be grasped at a time. Nonprehensile manipulation offers richer set of interactions, however state-of-the-art is limited to using the end-effector only. We propose using a robot link (forearm) to push multiple objects at once. In a simulated task where the robot's task is to sort two kinds of objects into their respective goal regions, we show that a greedy strategy that uses a combination of forearm pushes and pick and place operations reduces task completion time by %28 compared to picking and placing each object individually.
* Presented in Workshop for Task-Informed Grasping: From Perception to
Physical Interaction at RSS 2019
View paper on