 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeExploring Computational User Models for Agent Policy Summarization
Paper and Code
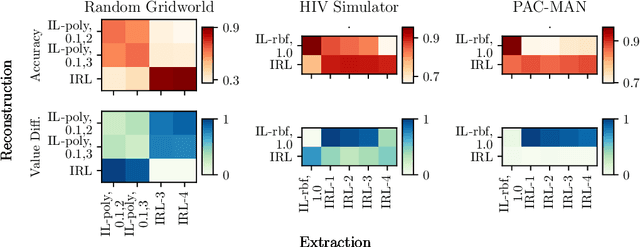
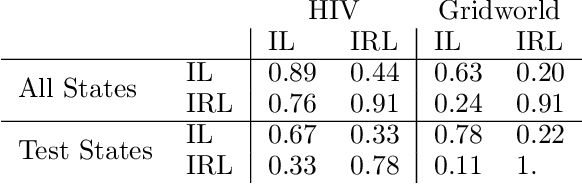
AI agents are being developed to support high stakes decision-making processes from driving cars to prescribing drugs, making it increasingly important for human users to understand their behavior. Policy summarization methods aim to convey strengths and weaknesses of such agents by demonstrating their behavior in a subset of informative states. Some policy summarization methods extract a summary that optimizes the ability to reconstruct the agent's policy under the assumption that users will deploy inverse reinforcement learning. In this paper, we explore the use of different models for extracting summaries. We introduce an imitation learning-based approach to policy summarization; we demonstrate through computational simulations that a mismatch between the model used to extract a summary and the model used to reconstruct the policy results in worse reconstruction quality; and we demonstrate through a human-subject study that people use different models to reconstruct policies in different contexts, and that matching the summary extraction model to these can improve performance. Together, our results suggest that it is important to carefully consider user models in policy summarization.