Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeScene Induced Multi-Modal Trajectory Forecasting via Planning
Paper and Code
May 23, 2019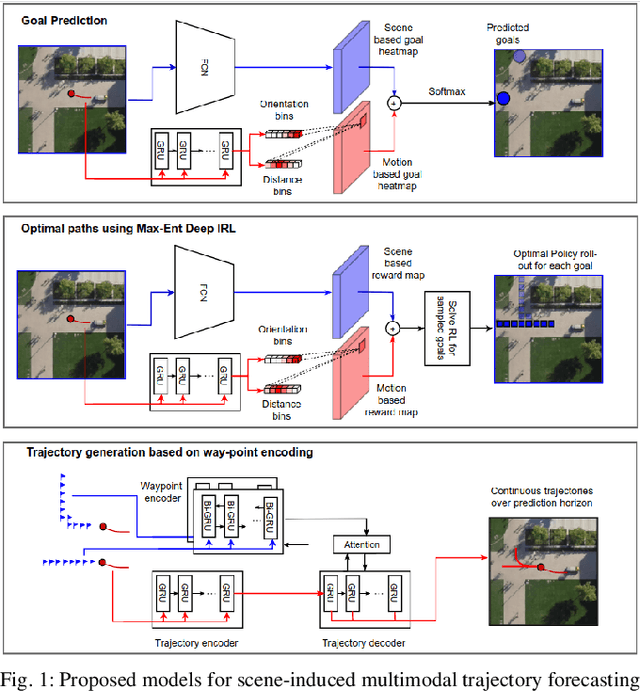
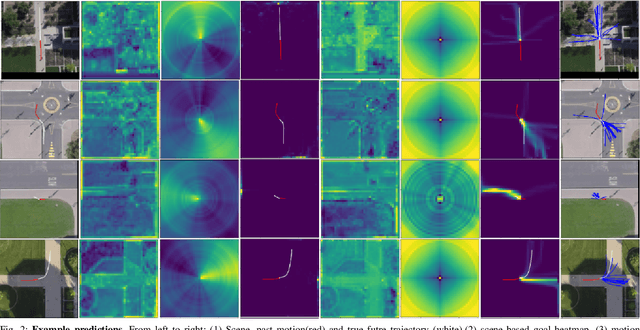
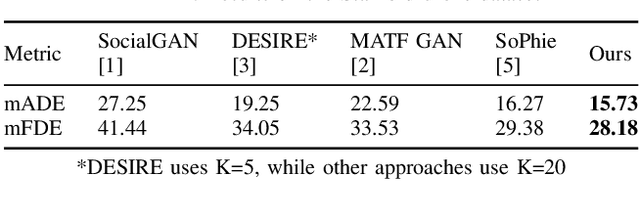
We address multi-modal trajectory forecasting of agents in unknown scenes by formulating it as a planning problem. We present an approach consisting of three models; a goal prediction model to identify potential goals of the agent, an inverse reinforcement learning model to plan optimal paths to each goal, and a trajectory generator to obtain future trajectories along the planned paths. Analysis of predictions on the Stanford drone dataset, shows generalizability of our approach to novel scenes.
* ICRA Workshop on Long Term Human Motion Prediction (extended
abstract)
View paper on