 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDS-VIO: Robust and Efficient Stereo Visual Inertial Odometry based on Dual Stage EKF
Paper and Code
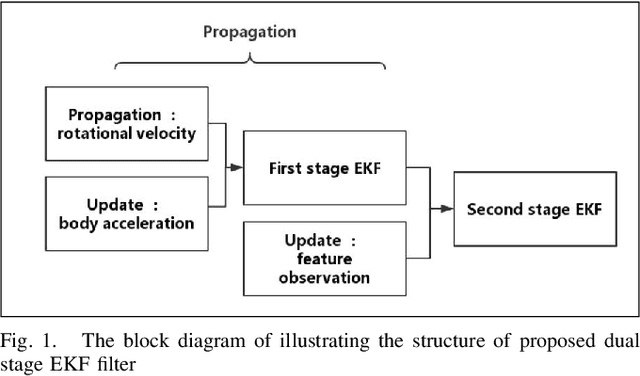
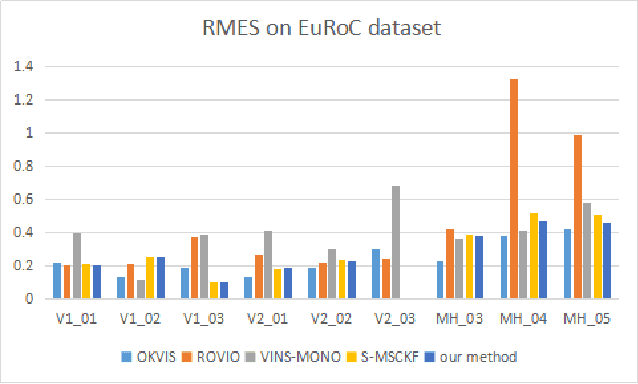
This paper presents a dual stage EKF (Extended Kalman Filter)-based algorithm for the real-time and robust stereo VIO (visual inertial odometry). The first stage of this EKF-based algorithm performs the fusion of accelerometer and gyroscope while the second performs the fusion of stereo camera and IMU. Due to the sufficient complementary characteristics between accelerometer and gyroscope as well as stereo camera and IMU, the dual stage EKF-based algorithm can achieve a high precision of odometry estimations. At the same time, because of the low dimension of state vector in this algorithm, its computational efficiency is comparable to previous filter-based approaches. We call our approach DS-VIO (dual stage EKFbased stereo visual inertial odometry) and evaluate our DSVIO algorithm by comparing it with the state-of-art approaches including OKVIS, ROVIO, VINS-MONO and S-MSCKF on the EuRoC dataset. Results show that our algorithm can achieve comparable or even better performances in terms of the RMS error