 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeQuasi-static Analysis of Planar Sliding Using Friction Patches
Paper and Code
Apr 14, 2019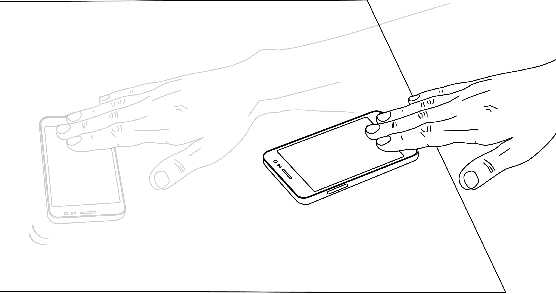
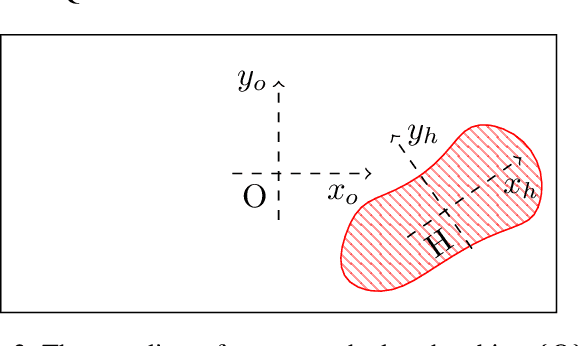
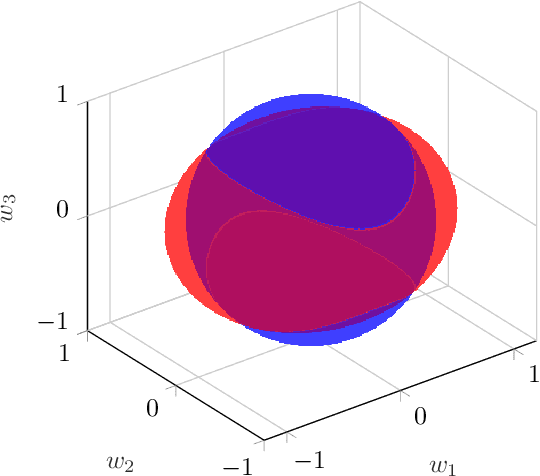
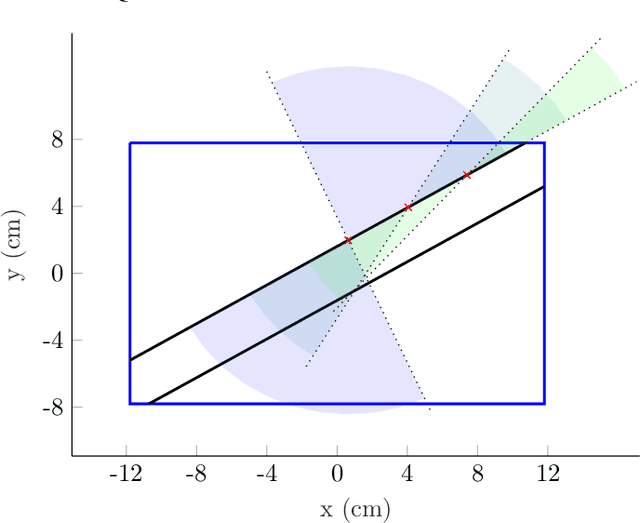
Planar sliding of objects is modeled and analyzed. The model can be used for non-prehensile manipulation of objects lying on a surface. We study possible motions generated by frictional contacts, such as those arising between a soft finger and a flat object on a table. Specifically, using a quasi-static analysis we are able to derive a hybrid dynamical system to predict the motion of the object. The model can be used to find fixed-points of the system and the path taken by the object to reach such configurations. Important information for planning, such as the conditions in which the object sticks to the friction patch, pivots, or completely slides against it are obtained. Experimental results confirm the validity of the model for a wide range of applications.