 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeInteraction-aware Decision Making with Adaptive Strategies under Merging Scenarios
Paper and Code
Apr 12, 2019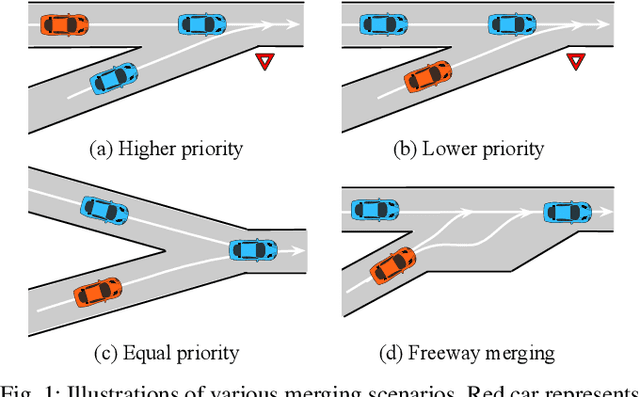
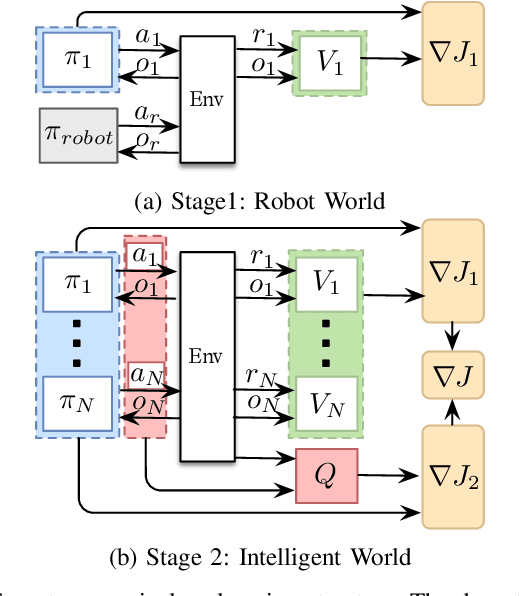
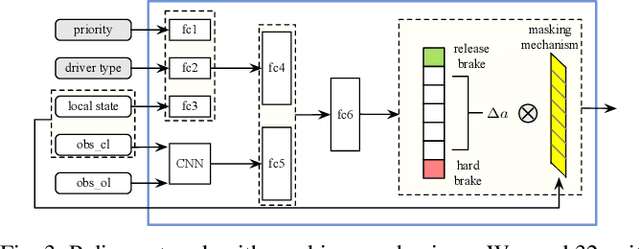
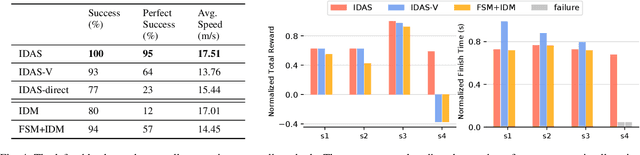
In order to drive safely and efficiently under merging scenarios, autonomous vehicles should be aware of their surroundings and make decisions by interacting with other road participants. Moreover, different strategies should be made when the autonomous vehicle is interacting with drivers having different level of cooperativeness. Whether the vehicle is on the merge-lane or main-lane will also influence the driving maneuvers since drivers will behave differently when they have the right-of-way than otherwise. Many traditional methods have been proposed to solve decision making problems under merging scenarios. However, these works either are incapable of modeling complicated interactions or require implementing hand-designed rules which cannot properly handle the uncertainties in real-world scenarios. In this paper, we proposed an interaction-aware decision making with adaptive strategies (IDAS) approach that can let the autonomous vehicle negotiate the road with other drivers by leveraging their cooperativeness under merging scenarios. A single policy is learned under the multi-agent reinforcement learning (MARL) setting via the curriculum learning strategy, which enables the agent to automatically infer other drivers' various behaviors and make decisions strategically. A masking mechanism is also proposed to prevent the agent from exploring states that violate common sense of human judgment and increase the learning efficiency. An exemplar merging scenario was used to implement and examine the proposed method.