 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeStreaming Scene Maps for Co-Robotic Exploration in Bandwidth Limited Environments
Paper and Code
Mar 07, 2019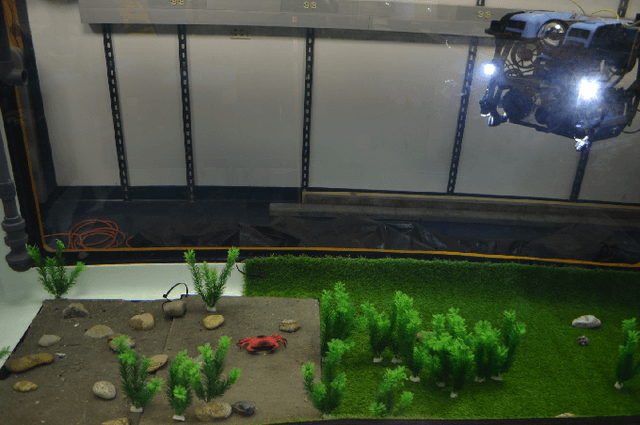
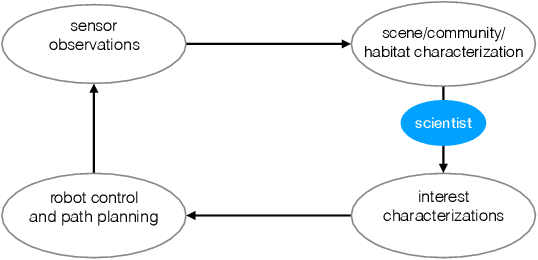
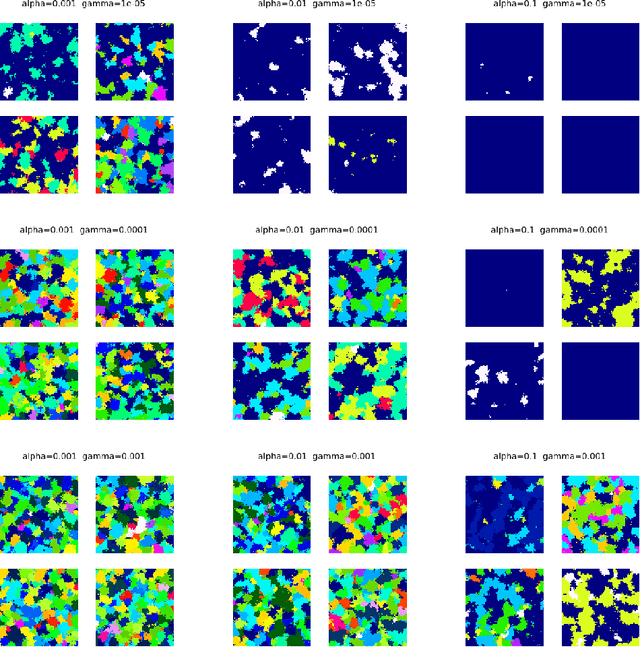
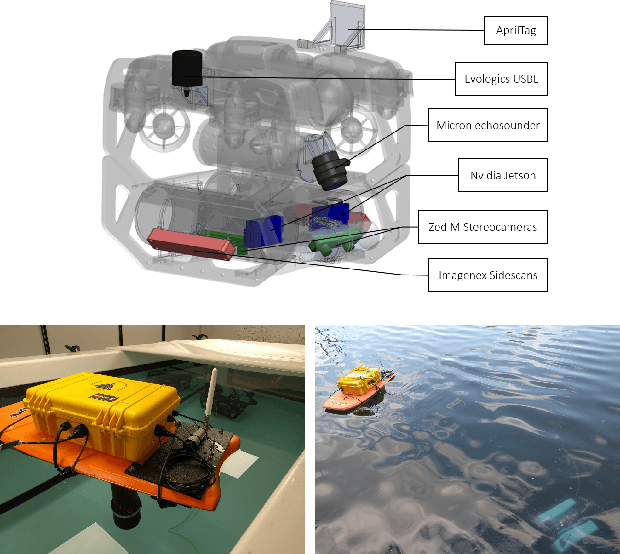
This paper proposes a bandwidth tunable technique for real-time probabilistic scene modeling and mapping to enable co-robotic exploration in communication constrained environments such as the deep sea. The parameters of the system enable the user to characterize the scene complexity represented by the map, which in turn determines the bandwidth requirements. The approach is demonstrated using an underwater robot that learns an unsupervised scene model of the environment and then uses this scene model to communicate the spatial distribution of various high-level semantic scene constructs to a human operator. Preliminary experiments in an artificially constructed tank environment as well as simulated missions over a 10m$\times$10m coral reef using real data show the tunability of the maps to different bandwidth constraints and science interests. To our knowledge this is the first paper to quantify how the free parameters of the unsupervised scene model impact both the scientific utility of and bandwidth required to communicate the resulting scene model.