 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeOptimal Dexterity for a Snake-like Surgical Manipulator using Patient-specific Task-space Constraints in a Computational Design Algorithm
Paper and Code
Mar 06, 2019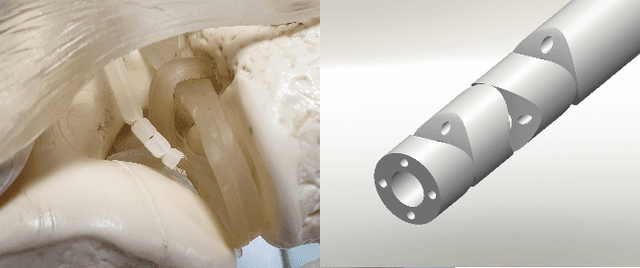
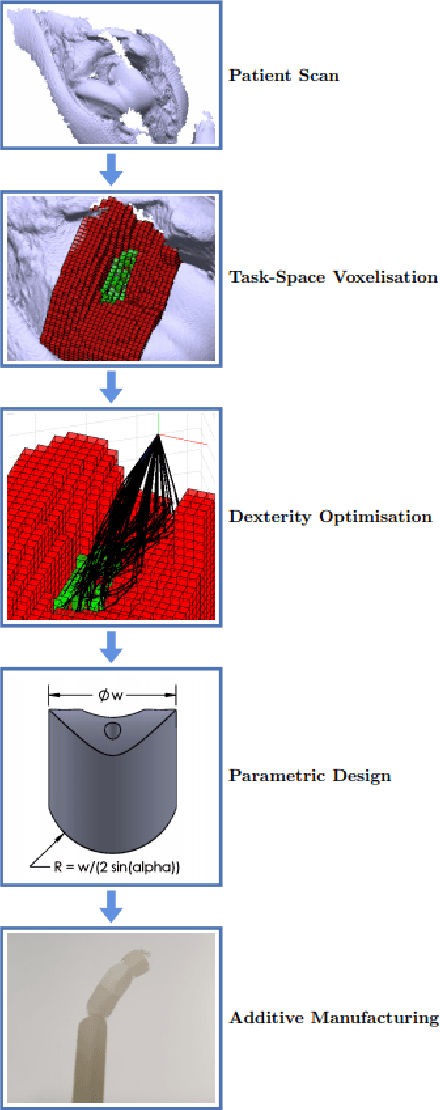
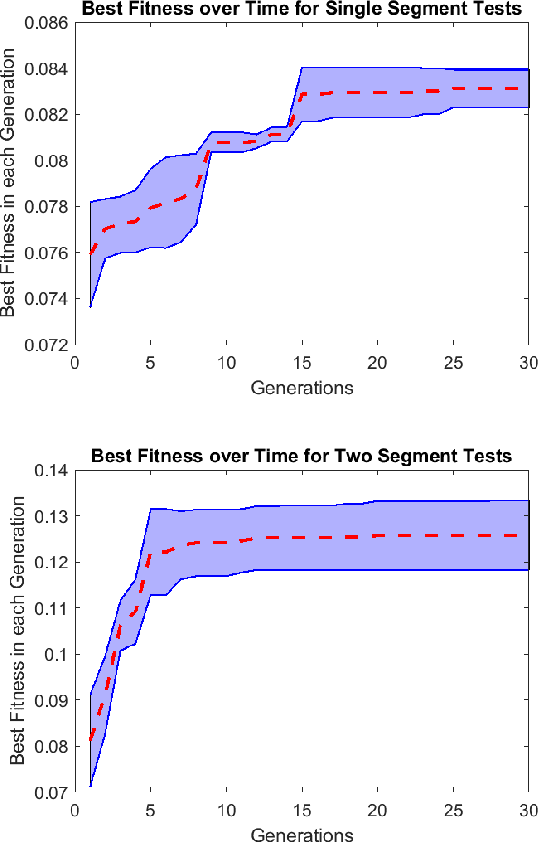
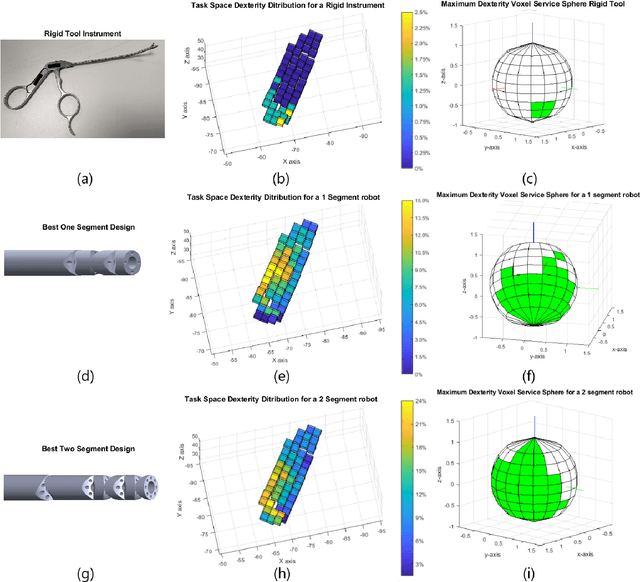
Tendon-driven snake-like arms have been used to create highly dexterous continuum robots so that they can bend around anatomical obstacles to access clinical targets. In this paper, we propose a design algorithm for developing patient-specific surgical continuum manipulators optimized for oriental dexterity constrained by task-space obstacles. The algorithm uses a sampling-based approach to finding the dexterity distribution in the workspace discretized by voxels. The oriental dexterity measured in the region of interest in the task-space formed a fitness function to be optimized through differential evolution. This was implemented in the design of a tendon-driven manipulator for knee arthroscopy. The results showed a feasible design that achieves significantly better dexterity than a rigid tool. This highlights the potential of the proposed method to be used in the process of designing dexterous surgical manipulators in the field.