 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAn LSTM Network for Real-Time Odometry Estimation
Paper and Code
Feb 22, 2019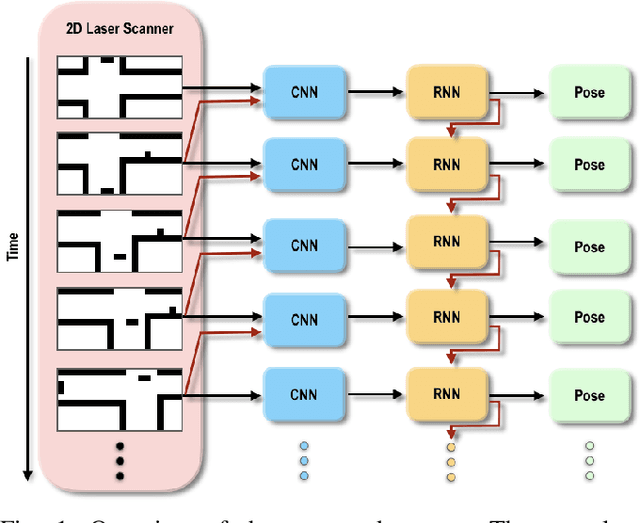
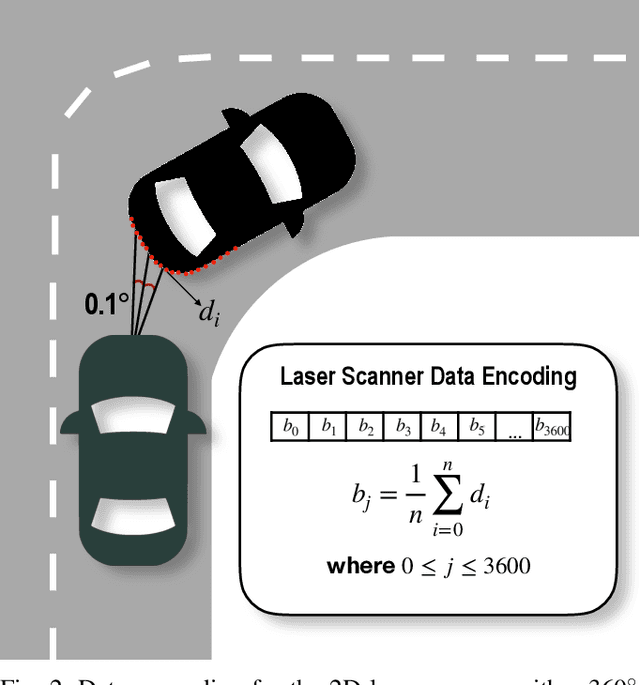
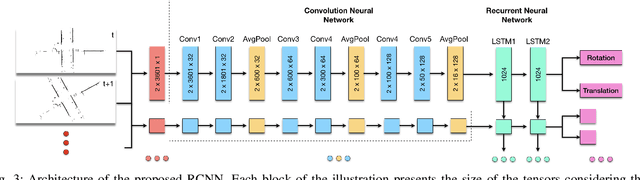
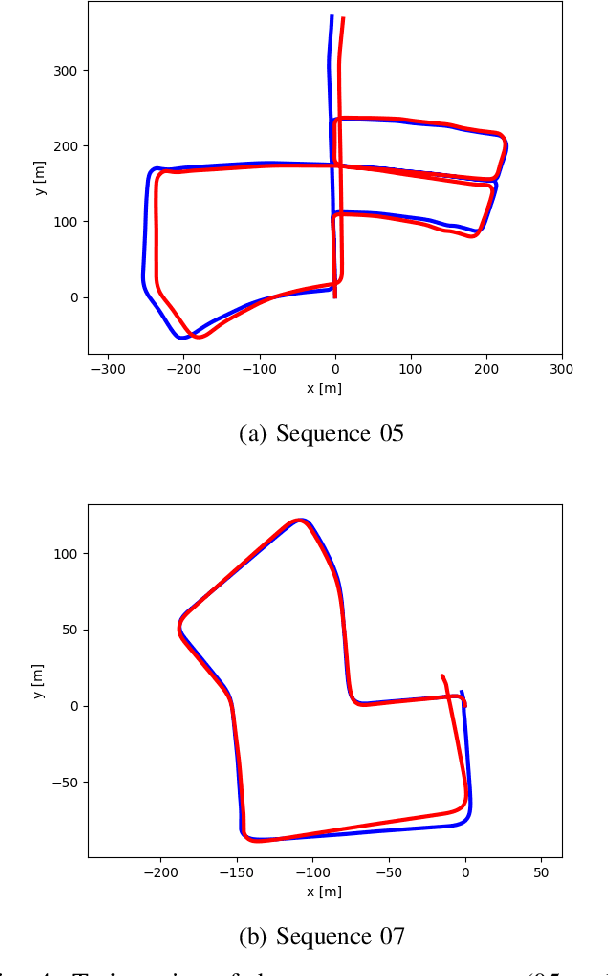
The use of 2D laser scanners is attractive for the autonomous driving industry because of its accuracy, light-weight and low-cost. However, since only a 2D slice of the surrounding environment is detected at each scan, it is a challenge to execute important tasks such as the localization of the vehicle. In this paper we present a novel framework that explores the use of deep Recurrent Convolutional Neural Networks (RCNN) for odometry estimation using only 2D laser scanners. The application of RCNNs provides the tools to not only extract the features of the laser scanner data using Convolutional Neural Networks (CNNs), but in addition it models the possible connections among consecutive scans using the Long Short-Term Memory (LSTM) Recurrent Neural Network. Results on a real road dataset show that the method can run in real-time without using GPU acceleration and have competitive performance compared to other methods, being an interesting approach that could complement traditional localization systems.