 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDeep Sensor Fusion for Real-Time Odometry Estimation
Jul 31, 2019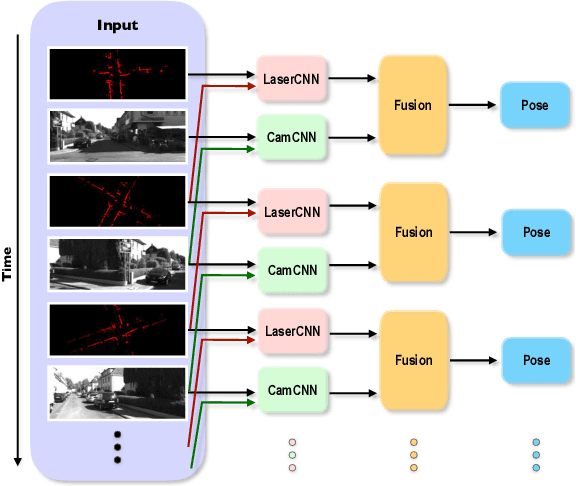
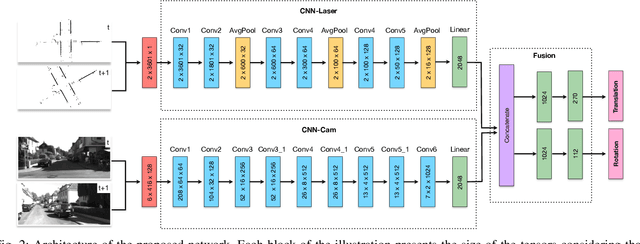
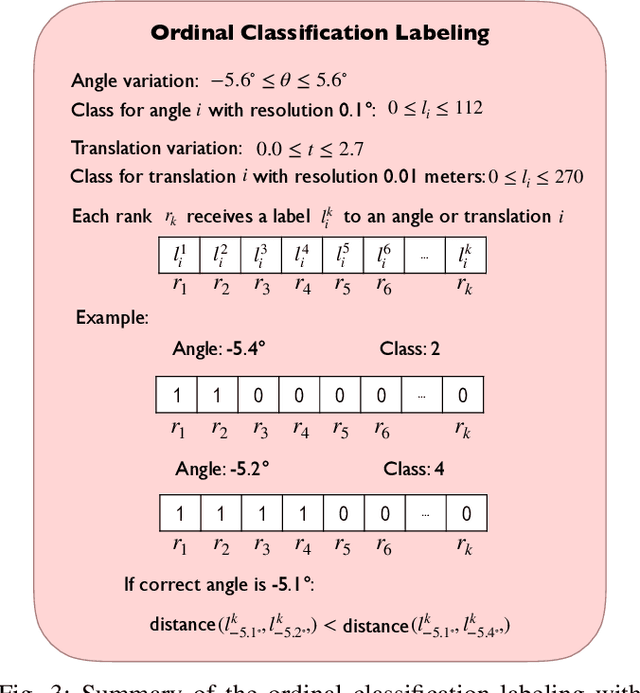
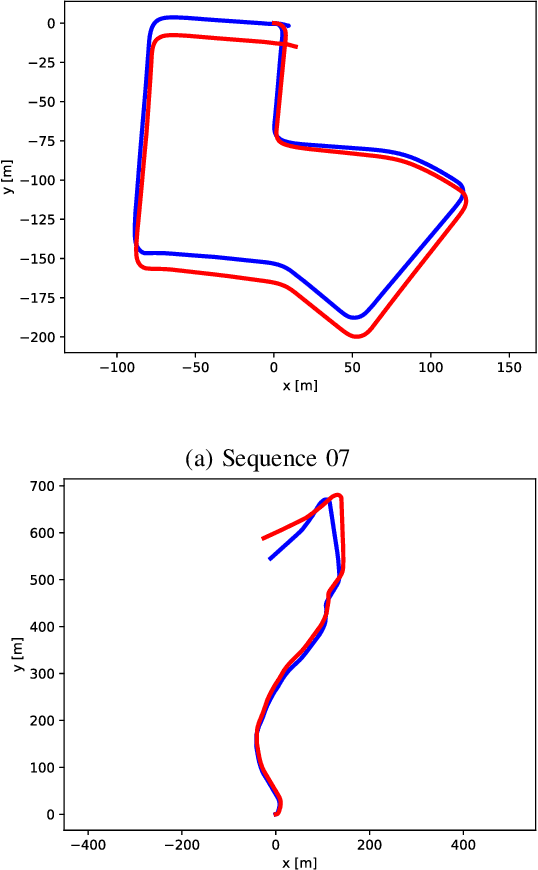
Cameras and 2D laser scanners, in combination, are able to provide low-cost, light-weight and accurate solutions, which make their fusion well-suited for many robot navigation tasks. However, correct data fusion depends on precise calibration of the rigid body transform between the sensors. In this paper we present the first framework that makes use of Convolutional Neural Networks (CNNs) for odometry estimation fusing 2D laser scanners and mono-cameras. The use of CNNs provides the tools to not only extract the features from the two sensors, but also to fuse and match them without needing a calibration between the sensors. We transform the odometry estimation into an ordinal classification problem in order to find accurate rotation and translation values between consecutive frames. Results on a real road dataset show that the fusion network runs in real-time and is able to improve the odometry estimation of a single sensor alone by learning how to fuse two different types of data information.
Fusing Laser Scanner and Stereo Camera in Evidential Grid Maps
Feb 22, 2019
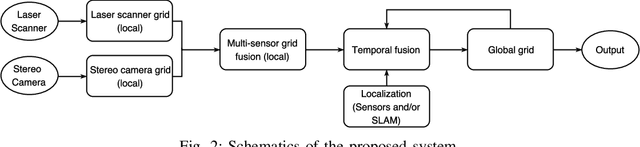
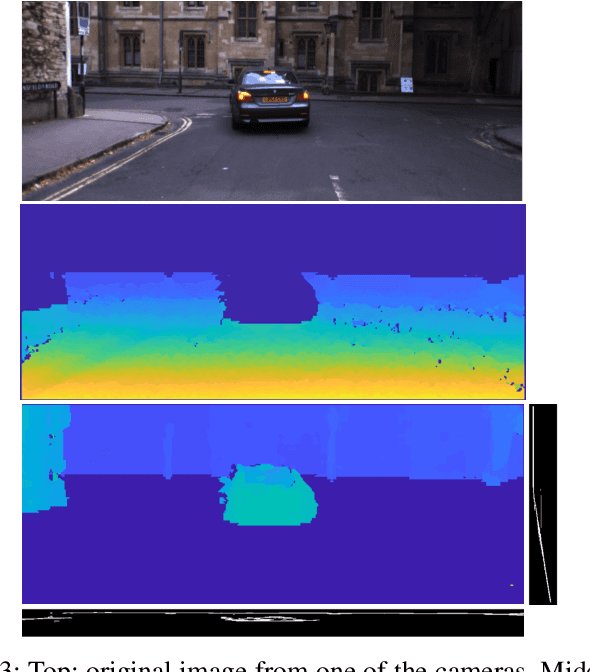
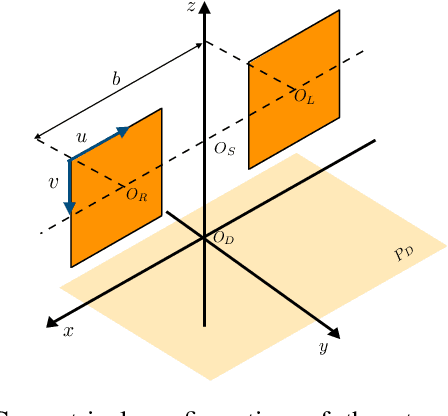
Automation driving techniques have seen tremendous progresses these last years, particularly due to a better perception of the environment. In order to provide safe yet not too conservative driving in complex urban environment, data fusion should not only consider redundant sensing to characterize the surrounding obstacles, but also be able to describe the uncertainties and errors beyond presence/absence (be it binary or probabilistic). This paper introduces an enriched representation of the world, more precisely of the potential existence of obstacles through an evidential grid map. A method to create this representation from 2 very different sensors, laser scanner and stereo camera, is presented along with algorithms for data fusion and temporal updates. This work allows a better handling of the dynamic aspects of the urban environment and a proper management of errors in order to create a more reliable map. We use the evidential framework based on the Dempster-Shafer theory to model the environment perception by the sensors. A new combination operator is proposed to merge the different sensor grids considering their distinct uncertainties. In addition, we introduce a new long-life layer with high level states that allows the maintenance of a global map of the entire vehicle's trajectory and distinguish between static and dynamic obstacles. Results on a real road dataset show that the environment mapping data can be improved by adding relevant information that could be missed without the proposed approach.
An LSTM Network for Real-Time Odometry Estimation
Feb 22, 2019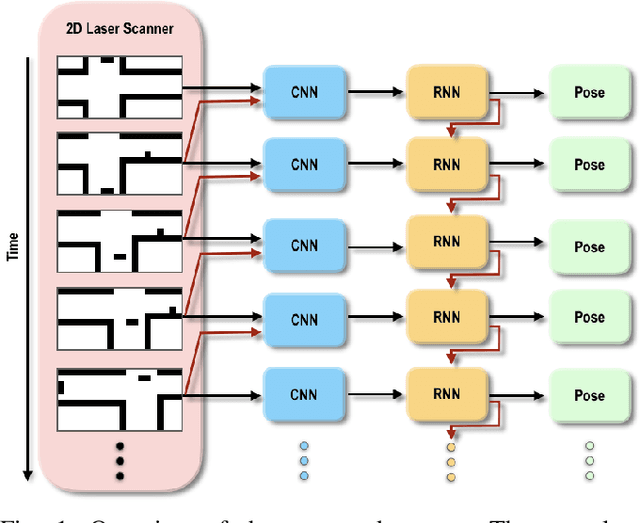
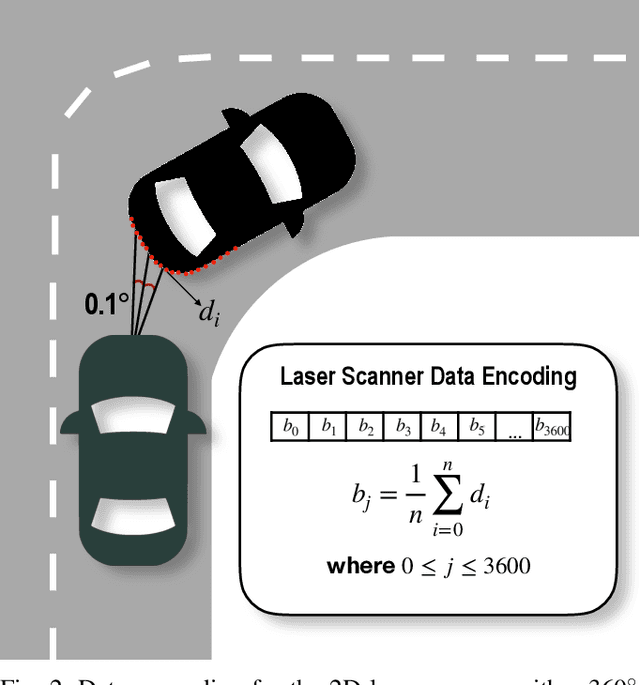
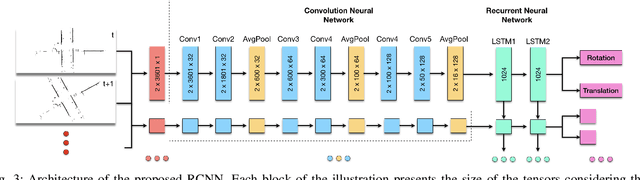
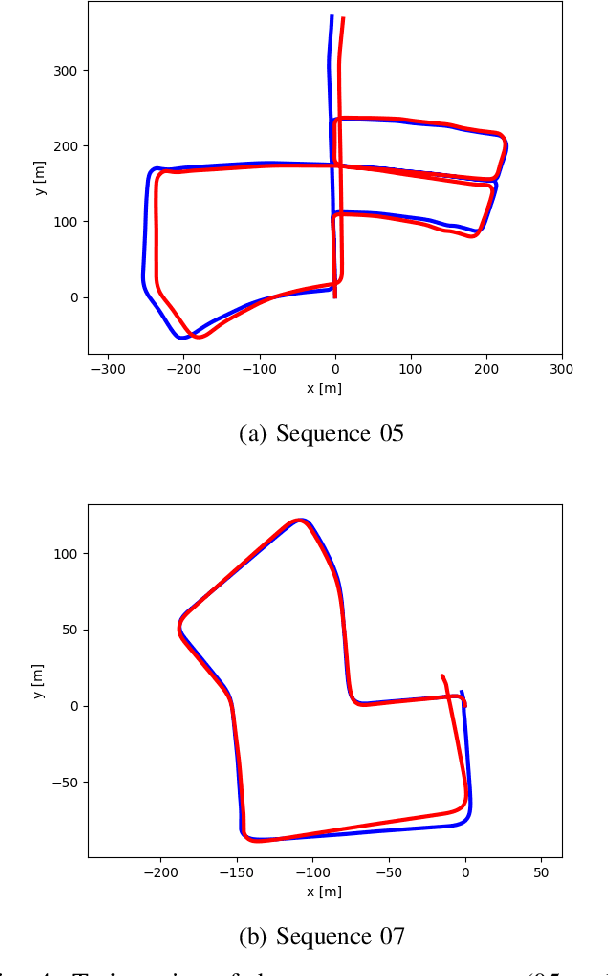
The use of 2D laser scanners is attractive for the autonomous driving industry because of its accuracy, light-weight and low-cost. However, since only a 2D slice of the surrounding environment is detected at each scan, it is a challenge to execute important tasks such as the localization of the vehicle. In this paper we present a novel framework that explores the use of deep Recurrent Convolutional Neural Networks (RCNN) for odometry estimation using only 2D laser scanners. The application of RCNNs provides the tools to not only extract the features of the laser scanner data using Convolutional Neural Networks (CNNs), but in addition it models the possible connections among consecutive scans using the Long Short-Term Memory (LSTM) Recurrent Neural Network. Results on a real road dataset show that the method can run in real-time without using GPU acceleration and have competitive performance compared to other methods, being an interesting approach that could complement traditional localization systems.