 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeGeometric interpretation of the general POE model for a serial-link robot via conversion into D-H parameterization
Paper and Code
Feb 01, 2019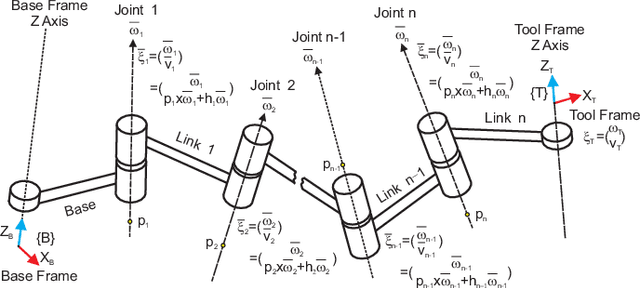
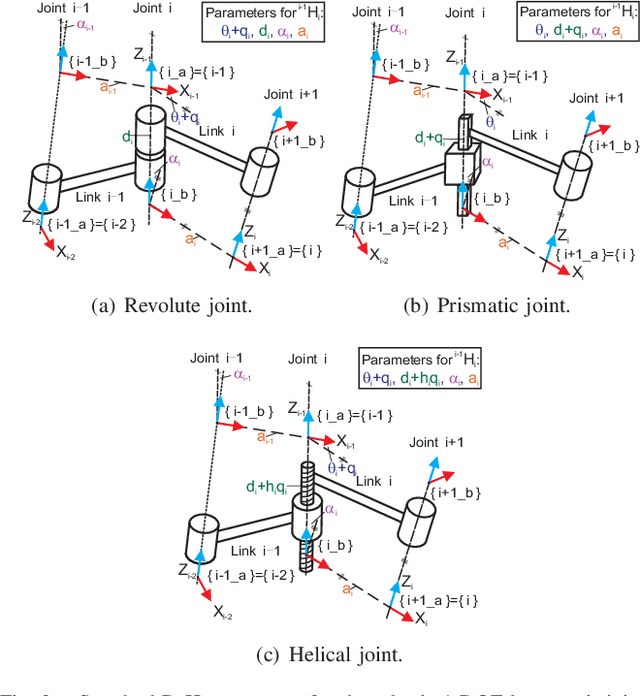
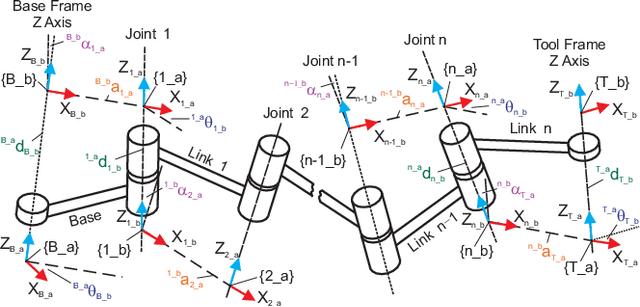
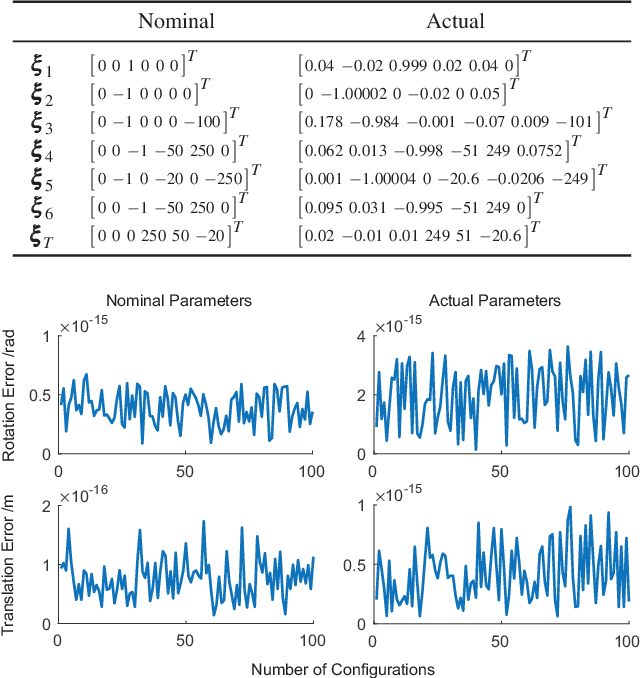
While Product of Exponentials (POE) formula has been gaining increasing popularity in modeling the kinematics of a serial-link robot, the Denavit-Hartenberg (D-H) notation is still the most widely used due to its intuitive and concise geometric interpretation of the robot. This paper has developed an analytical solution to automatically convert a POE model into a D-H model for a robot with revolute, prismatic, and helical joints, which are the complete set of three basic one degree of freedom lower pair joints for constructing a serial-link robot. The conversion algorithm developed can be used in applications such as calibration where it is necessary to convert the D-H model to the POE model for identification and then back to the D-H model for compensation. The equivalence of the two models proved in this paper also benefits the analysis of the identifiability of the kinematic parameters. It is found that the maximum number of identifiable parameters in a general POE model is 5h+4r +2t +n+6 where h, r, t, and n stand for the number of helical, revolute, prismatic, and general joints, respectively. It is also suggested that the identifiability of the base frame and the tool frame in the D-H model is restricted rather than the arbitrary six parameters as assumed previously.