 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDeep Active Learning for Efficient Training of a LiDAR 3D Object Detector
Paper and Code
Jan 29, 2019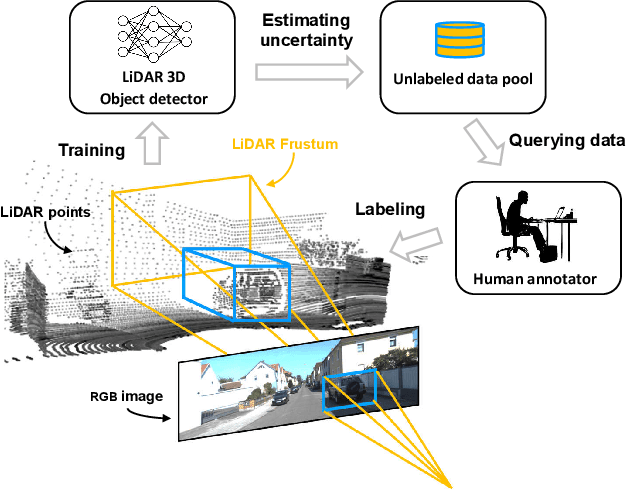
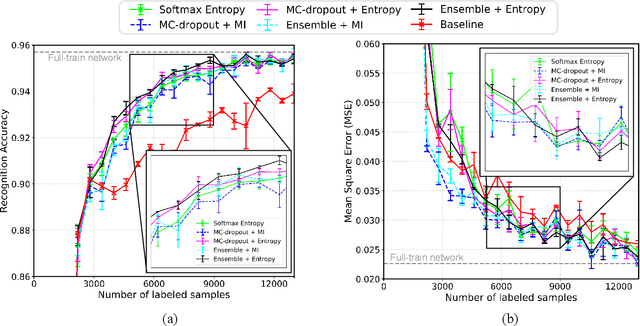
Training a deep object detector for autonomous driving requires a huge amount of labeled data. While recording data via on-board sensors such as camera or LiDAR is relatively easy, annotating data is very tedious and time-consuming, especially when dealing with 3D LiDAR points or radar data. Active learning has the potential to minimize human annotation efforts while maximizing the object detector's performance. In this work, we propose an active learning method to train a LiDAR 3D object detector with the least amount of labeled training data necessary. The detector leverages 2D region proposals generated from the RGB images to reduce the search space of objects and speed up the learning process. Experiments show that our proposed method works under different uncertainty estimations and query functions, and can save up to 60% of the labeling efforts while reaching the same network performance.